-
 암세포만 공략하는 스마트 면역세포 시스템 개발
우리 대학 바이오및뇌공학과 최정균 교수와 의과학대학원 박종은 교수 공동연구팀이 인공지능과 빅데이터 분석을 기반으로 스마트 면역세포를 통한 암 치료의 핵심 기술을 개발했다고 밝혔다. 이 기술은 키메라 항원 수용체(Chimeric antigen receptor, CAR)가 논리회로를 통해 작동하게 함으로써 정확하게 암세포만 공략할 수 있도록 하는 차세대 면역항암 치료법으로 기대가 모아진다. 이번 연구는 분당차병원 안희정 교수와 가톨릭의대 이혜옥 교수가 공동연구로 참여했다.
최정균 교수 연구팀은 수백만개의 세포에 대한 유전자 발현 데이터베이스를 구축하고 이를 이용해 종양세포와 정상세포 간의 유전자 발현 양상 차이를 논리회로 기반으로 찾아낼 수 있는 딥러닝 알고리즘을 개발하고 검증하는 데 성공했다. 이 방법론으로 찾아진 논리회로를 장착한 CAR 면역세포는 마치 컴퓨터처럼 암과 정상 세포를 구별하여 작동함으로써 부작용없이 암세포만 정확하게 공략하는 것이 가능하다.
바이오및뇌공학과 권준하 박사, 의과학대학원 강준호 박사과정 학생이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 '네이처 바이오테크놀로지(Nature Biotechnology)'에 지난 2월 16일 출판됐다. (논문명: Single-cell mapping of combinatorial target antigens for CAR switches using logic gates)
최근의 암 연구에서 가장 많은 시도와 진전이 있었던 분야는 바로 면역항암치료이다. 암환자가 갖고 있는 면역체계를 활용하여 암을 극복하는 이 치료 분야에는 몇 가지 방법이 있는데, 면역관문억제제 및 암백신과 더불어 세포치료 또한 해당된다. 특히, 키메라 항원 수용체를 장착한 CAR-T 혹은 CAR-NK라고 하는 면역세포들은 암항원을 인식하여 암세포를 직접 파괴할 수 있다.
CAR 세포치료는 현재 혈액암에서의 성공을 시작으로 고형암으로 그 적용 범위를 넓히고자 하는 중인데, 혈액암과 달리 고형암에서는 부작용을 최소화하면서 효과적인 암 살상 능력을 보유하는 CAR 세포 개발에 어려움이 있었다. 이에 따라 최근에는 한 단계 진보된 CAR 엔지니어링 기술, 즉 AND, OR, NOT 과 같은 컴퓨터 연산 논리회로를 활용해 효과적으로 암세포를 공략할 수 있는 스마트 면역세포 개발이 활발히 진행되고 있다.
이러한 시점에서, 연구진은 세포 단위에서 정확히 암세포들에서만 발현하는 유전자들을 발굴하기 위해 대규모 암 및 정상 단일세포 데이터베이스를 구축했다. 이어서 연구진은 암세포들과 정상세포들을 가장 잘 구별할 수 있는 유전자 조합을 검색하는 인공지능 알고리즘을 개발했다. 특히 이 알고리즘은, 모든 유전자 조합에 대한 세포 단위 시뮬레이션을 통해 암세포만을 특이적으로 공략할 수 있는 논리회로를 찾아내는데 사용되었다. 이 방법론으로 찾아진 논리회로를 장착한 CAR 면역세포는 마치 컴퓨터처럼 암과 정상 세포를 구별하여 작동함으로써 부작용은 최소화하면서도 항암치료의 효과는 극대화시킬 수 있을 것으로 기대된다.
제1 저자인 권준하 박사는 "이번 연구는 이전에 시도된 적이 없는 방법론을 제시했는데, 특히 주목할 점은 수백만개의 개별 암세포 및 정상세포들에 대한 시뮬레이션을 통해 최적의 CAR 세포용 회로들을 찾아낸 과정이다ˮ라며 "인공지능과 컴퓨터 논리회로를 면역세포 엔지니어링에 적용하는 획기적인 기술로서 혈액암에서 성공적으로 사용되고 있는 CAR 세포치료가 고형암으로 확대되는데 중요한 역할을 할 것으로 기대된다"고 설명했다.ᅠ
이번 연구는 한국연구재단 원천기술개발사업-차세대응용오믹스사업의 지원을 받아 수행됐다.
암세포만 공략하는 스마트 면역세포 시스템 개발
우리 대학 바이오및뇌공학과 최정균 교수와 의과학대학원 박종은 교수 공동연구팀이 인공지능과 빅데이터 분석을 기반으로 스마트 면역세포를 통한 암 치료의 핵심 기술을 개발했다고 밝혔다. 이 기술은 키메라 항원 수용체(Chimeric antigen receptor, CAR)가 논리회로를 통해 작동하게 함으로써 정확하게 암세포만 공략할 수 있도록 하는 차세대 면역항암 치료법으로 기대가 모아진다. 이번 연구는 분당차병원 안희정 교수와 가톨릭의대 이혜옥 교수가 공동연구로 참여했다.
최정균 교수 연구팀은 수백만개의 세포에 대한 유전자 발현 데이터베이스를 구축하고 이를 이용해 종양세포와 정상세포 간의 유전자 발현 양상 차이를 논리회로 기반으로 찾아낼 수 있는 딥러닝 알고리즘을 개발하고 검증하는 데 성공했다. 이 방법론으로 찾아진 논리회로를 장착한 CAR 면역세포는 마치 컴퓨터처럼 암과 정상 세포를 구별하여 작동함으로써 부작용없이 암세포만 정확하게 공략하는 것이 가능하다.
바이오및뇌공학과 권준하 박사, 의과학대학원 강준호 박사과정 학생이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 '네이처 바이오테크놀로지(Nature Biotechnology)'에 지난 2월 16일 출판됐다. (논문명: Single-cell mapping of combinatorial target antigens for CAR switches using logic gates)
최근의 암 연구에서 가장 많은 시도와 진전이 있었던 분야는 바로 면역항암치료이다. 암환자가 갖고 있는 면역체계를 활용하여 암을 극복하는 이 치료 분야에는 몇 가지 방법이 있는데, 면역관문억제제 및 암백신과 더불어 세포치료 또한 해당된다. 특히, 키메라 항원 수용체를 장착한 CAR-T 혹은 CAR-NK라고 하는 면역세포들은 암항원을 인식하여 암세포를 직접 파괴할 수 있다.
CAR 세포치료는 현재 혈액암에서의 성공을 시작으로 고형암으로 그 적용 범위를 넓히고자 하는 중인데, 혈액암과 달리 고형암에서는 부작용을 최소화하면서 효과적인 암 살상 능력을 보유하는 CAR 세포 개발에 어려움이 있었다. 이에 따라 최근에는 한 단계 진보된 CAR 엔지니어링 기술, 즉 AND, OR, NOT 과 같은 컴퓨터 연산 논리회로를 활용해 효과적으로 암세포를 공략할 수 있는 스마트 면역세포 개발이 활발히 진행되고 있다.
이러한 시점에서, 연구진은 세포 단위에서 정확히 암세포들에서만 발현하는 유전자들을 발굴하기 위해 대규모 암 및 정상 단일세포 데이터베이스를 구축했다. 이어서 연구진은 암세포들과 정상세포들을 가장 잘 구별할 수 있는 유전자 조합을 검색하는 인공지능 알고리즘을 개발했다. 특히 이 알고리즘은, 모든 유전자 조합에 대한 세포 단위 시뮬레이션을 통해 암세포만을 특이적으로 공략할 수 있는 논리회로를 찾아내는데 사용되었다. 이 방법론으로 찾아진 논리회로를 장착한 CAR 면역세포는 마치 컴퓨터처럼 암과 정상 세포를 구별하여 작동함으로써 부작용은 최소화하면서도 항암치료의 효과는 극대화시킬 수 있을 것으로 기대된다.
제1 저자인 권준하 박사는 "이번 연구는 이전에 시도된 적이 없는 방법론을 제시했는데, 특히 주목할 점은 수백만개의 개별 암세포 및 정상세포들에 대한 시뮬레이션을 통해 최적의 CAR 세포용 회로들을 찾아낸 과정이다ˮ라며 "인공지능과 컴퓨터 논리회로를 면역세포 엔지니어링에 적용하는 획기적인 기술로서 혈액암에서 성공적으로 사용되고 있는 CAR 세포치료가 고형암으로 확대되는데 중요한 역할을 할 것으로 기대된다"고 설명했다.ᅠ
이번 연구는 한국연구재단 원천기술개발사업-차세대응용오믹스사업의 지원을 받아 수행됐다.
2023.03.02
조회수 15415
-
 뇌 속 자명종 신경회로 발견
우리 대학 생명과학과 김대수 교수 연구팀이 한국과학기술연구원(KIST) 김정진 박사팀과 공동연구를 통해 동물이 잠을 자는 동안에도 소리에 반응해 각성하는 원리를 규명했다고 20일 밝혔다.
수면은 뇌의 활동을 정비하고 건강을 유지하는 매우 중요한 생리작용이다. 잠을 자는 동안 감각신경의 작용이 차단되므로 주변의 위험을 감지하는 능력이 감소하게 된다. 그러나 많은 동물은 잠자는 동안에도 포식자의 접근을 감지하고 반응한다. 과학자들은 동물이 깊은 잠과 낮은 잠을 번갈아 자면서 언제 있을지 모를 위험에 대비한다고 생각했다.
김대수 교수 연구팀은 깊은 잠을 자는 동안에도 동물이 소리에 반응하는 신경회로가 있다는 사실을 발견했다. 깨어 있을 때는 청각 시상핵 (Medial geniculate thalamus)이 소리에 반응하지만 깊은 잠 즉 비 램수면 (Non-REM) 동안에는 배내측 시상핵(Mediodorsal thalamus)이 소리에 반응해 뇌를 깨운다는 사실을 밝혔다.
연구 결과 쥐가 깊은 잠에 빠졌을 때 청각 시상핵 신경도 잠을 자고 있었지만 배내측 시상핵 신경은 깨어 있어 소리를 들려주자 곧바로 반응했다. 또한 배내측 시상핵을 억제하면 소리를 들려줘도 쥐가 잠에서 깨어나지 못했으며 배내측 시상핵을 자극하면 소리 없이도 쥐가 수초 이내에 잠에서 깨어나는 것을 관찰할 수 있었다.
이것은 수면상태와 각성상태가 서로 다른 신경회로를 통해 청각신호를 전달 할 수 있다는 최초의 연구로서 국제 학술지 ‘커런트 바이올로지 (Current Biology)’에 2월 7일자로 보고됐으며 (https://www.nature.com/articles/d41586-023-00354-0) 국제학술지 네이처에 하이라이트 되었다. ( https://www.nature.com/articles/d41586-023-00354-0)
김대수 교수는 “이번 연구를 통해 수면 질환 등 다양한 뇌 질환에서 보이는 각성 및 감각장애에 대한 이해를 증진하고 향후 감각을 조절할 수 있는 디지털 헬스케어 개발 등 다양한 분야로 활용이 가능하다”라고 설명했다.
한편 이번 연구는 한국연구재단 중견연구재단 과제로 지원됐다.
뇌 속 자명종 신경회로 발견
우리 대학 생명과학과 김대수 교수 연구팀이 한국과학기술연구원(KIST) 김정진 박사팀과 공동연구를 통해 동물이 잠을 자는 동안에도 소리에 반응해 각성하는 원리를 규명했다고 20일 밝혔다.
수면은 뇌의 활동을 정비하고 건강을 유지하는 매우 중요한 생리작용이다. 잠을 자는 동안 감각신경의 작용이 차단되므로 주변의 위험을 감지하는 능력이 감소하게 된다. 그러나 많은 동물은 잠자는 동안에도 포식자의 접근을 감지하고 반응한다. 과학자들은 동물이 깊은 잠과 낮은 잠을 번갈아 자면서 언제 있을지 모를 위험에 대비한다고 생각했다.
김대수 교수 연구팀은 깊은 잠을 자는 동안에도 동물이 소리에 반응하는 신경회로가 있다는 사실을 발견했다. 깨어 있을 때는 청각 시상핵 (Medial geniculate thalamus)이 소리에 반응하지만 깊은 잠 즉 비 램수면 (Non-REM) 동안에는 배내측 시상핵(Mediodorsal thalamus)이 소리에 반응해 뇌를 깨운다는 사실을 밝혔다.
연구 결과 쥐가 깊은 잠에 빠졌을 때 청각 시상핵 신경도 잠을 자고 있었지만 배내측 시상핵 신경은 깨어 있어 소리를 들려주자 곧바로 반응했다. 또한 배내측 시상핵을 억제하면 소리를 들려줘도 쥐가 잠에서 깨어나지 못했으며 배내측 시상핵을 자극하면 소리 없이도 쥐가 수초 이내에 잠에서 깨어나는 것을 관찰할 수 있었다.
이것은 수면상태와 각성상태가 서로 다른 신경회로를 통해 청각신호를 전달 할 수 있다는 최초의 연구로서 국제 학술지 ‘커런트 바이올로지 (Current Biology)’에 2월 7일자로 보고됐으며 (https://www.nature.com/articles/d41586-023-00354-0) 국제학술지 네이처에 하이라이트 되었다. ( https://www.nature.com/articles/d41586-023-00354-0)
김대수 교수는 “이번 연구를 통해 수면 질환 등 다양한 뇌 질환에서 보이는 각성 및 감각장애에 대한 이해를 증진하고 향후 감각을 조절할 수 있는 디지털 헬스케어 개발 등 다양한 분야로 활용이 가능하다”라고 설명했다.
한편 이번 연구는 한국연구재단 중견연구재단 과제로 지원됐다.
2023.02.20
조회수 9754
-
 ‘라이보’ 로봇, 해변을 거침없이 달리다
우리 대학 기계공학과 황보제민 교수 연구팀이 모래와 같이 변형하는 지형에서도 민첩하고 견고하게 보행할 수 있는 사족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래와 같은 입상 물질로 이루어진 지반에서 로봇 보행체가 받는 힘을 모델링하고, 이를 사족 로봇에 시뮬레이션하는 기술을 개발했다. 또한, 사전 정보 없이도 다양한 지반 종류에 스스로 적응해가며 보행하기에 적합한 인공신경망 구조를 도입해 강화학습에 적용했다. 학습된 신경망 제어기는 해변 모래사장에서의 고속 이동과 에어 매트리스 위에서의 회전을 선보이는 등 변화하는 지형에서의 견고성을 입증해 사족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
기계공학과 최수영 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다. (논문명 : Learning quadrupedal locomotion on deformable terrain)
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과들의 데이터를 수집하고 이를 사용해 임무를 수행하는 기계를 만드는 학습 방법이다. 이때 필요한 데이터의 양이 많아 실제 환경의 물리 현상을 근사하는 시뮬레이션으로 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기들은 시뮬레이션에서 수집한 데이터를 통해서 학습된 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 성공적으로 수행해 온 바 있다.
다만 학습한 시뮬레이션 환경과 실제 마주친 환경이 다른 경우 학습 기반 제어기의 성능은 급격히 감소하기 때문에, 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다. 따라서, 변형하는 지형을 극복하는 학습 기반 제어기를 만들기 위해서는 시뮬레이터는 유사한 접촉 경험을 제공해야 한다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 지반 반력 모델을 기반으로 보행체의 운동 역학으로부터 접촉에서 발생하는 힘을 예측하는 접촉 모델을 정의했다.
나아가 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 풀이함으로써 효율적으로 변형하는 지형을 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 나오는 시계열 데이터를 분석하는 순환 신경망을 사용함으로써 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 `라이보'에 탑재돼 로봇의 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 3.03 m/s의 고속 보행을 선보였으며, 추가 작업 없이 풀밭, 육상 트랙, 단단한 땅에 적용됐을 때도 지반 특성에 적응해 안정하게 주행할 수 있었다.
또한, 에어 매트리스에서 1.54 rad/s(초당 약 90°)의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀은 지면을 강체로 간주한 제어기와의 비교를 통해 학습 간 적합한 접촉 경험을 제공하는 것의 중요성을 드러냈으며, 제안한 순환 신경망이 지반 성질에 따라 제어기의 보행 방식을 수정한다는 것을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 다양한 보행 로봇이 극복할 수 있는 지형의 범위를 넓힘으로써 로봇이 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다.
제1 저자인 최수영 박사과정은 "학습 기반 제어기에 실제의 변형하는 지반과 가까운 접촉 경험을 제공하는 것이 변형하는 지형에 적용하는 데 필수적이라는 것을 보였다ˮ 라며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어 다양한 로봇 보행 연구에 접목될 수 있다ˮ 라고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
‘라이보’ 로봇, 해변을 거침없이 달리다
우리 대학 기계공학과 황보제민 교수 연구팀이 모래와 같이 변형하는 지형에서도 민첩하고 견고하게 보행할 수 있는 사족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래와 같은 입상 물질로 이루어진 지반에서 로봇 보행체가 받는 힘을 모델링하고, 이를 사족 로봇에 시뮬레이션하는 기술을 개발했다. 또한, 사전 정보 없이도 다양한 지반 종류에 스스로 적응해가며 보행하기에 적합한 인공신경망 구조를 도입해 강화학습에 적용했다. 학습된 신경망 제어기는 해변 모래사장에서의 고속 이동과 에어 매트리스 위에서의 회전을 선보이는 등 변화하는 지형에서의 견고성을 입증해 사족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
기계공학과 최수영 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다. (논문명 : Learning quadrupedal locomotion on deformable terrain)
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과들의 데이터를 수집하고 이를 사용해 임무를 수행하는 기계를 만드는 학습 방법이다. 이때 필요한 데이터의 양이 많아 실제 환경의 물리 현상을 근사하는 시뮬레이션으로 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기들은 시뮬레이션에서 수집한 데이터를 통해서 학습된 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 성공적으로 수행해 온 바 있다.
다만 학습한 시뮬레이션 환경과 실제 마주친 환경이 다른 경우 학습 기반 제어기의 성능은 급격히 감소하기 때문에, 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다. 따라서, 변형하는 지형을 극복하는 학습 기반 제어기를 만들기 위해서는 시뮬레이터는 유사한 접촉 경험을 제공해야 한다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 지반 반력 모델을 기반으로 보행체의 운동 역학으로부터 접촉에서 발생하는 힘을 예측하는 접촉 모델을 정의했다.
나아가 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 풀이함으로써 효율적으로 변형하는 지형을 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 나오는 시계열 데이터를 분석하는 순환 신경망을 사용함으로써 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 `라이보'에 탑재돼 로봇의 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 3.03 m/s의 고속 보행을 선보였으며, 추가 작업 없이 풀밭, 육상 트랙, 단단한 땅에 적용됐을 때도 지반 특성에 적응해 안정하게 주행할 수 있었다.
또한, 에어 매트리스에서 1.54 rad/s(초당 약 90°)의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀은 지면을 강체로 간주한 제어기와의 비교를 통해 학습 간 적합한 접촉 경험을 제공하는 것의 중요성을 드러냈으며, 제안한 순환 신경망이 지반 성질에 따라 제어기의 보행 방식을 수정한다는 것을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 다양한 보행 로봇이 극복할 수 있는 지형의 범위를 넓힘으로써 로봇이 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다.
제1 저자인 최수영 박사과정은 "학습 기반 제어기에 실제의 변형하는 지반과 가까운 접촉 경험을 제공하는 것이 변형하는 지형에 적용하는 데 필수적이라는 것을 보였다ˮ 라며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어 다양한 로봇 보행 연구에 접목될 수 있다ˮ 라고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
2023.01.26
조회수 10610
-
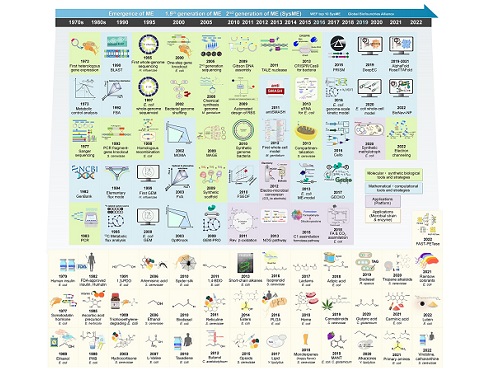 바이오경제를 이끌어가는 대사공학 30년 역사와 미래
우리 대학 생명화학공학과 이상엽 특훈교수 연구팀이 지난 30년간 대사공학이 발전해온 역사를 정리해, 대사공학이 어떻게 지속 가능한 발전에 기여할 수 있는 분석한 결과를 정리하여 ‘지속 가능성과 건강을 위한 대사공학’ 논문으로 발표했다고 25일 밝혔다. 이번 논문은 셀(Cell) 誌가 발행하는 생명공학 분야 권위 리뷰 저널인 `생명공학 동향(Trends in Biotechnology)'의 40주년 특집호 온라인판에 게재됐다.
※ 논문명 : Metabolic engineering for sustainability and health
※ 저자 정보 : 김기배(한국과학기술원, 공동 제1 저자), 최소영(한국과학기술원, 공동 제1 저자), 조인진(한국과학기술원, 공동 제1 저자), 안다희(한국과학기술원), 이상엽(한국과학기술원, 교신저자) 포함 총 5명
대사공학은 1990년대 초반부터 본격적으로 연구되어 지난 30년간 괄목할 만한 발전을 이뤘다. 대사공학은 산업, 의료, 농업 및 환경 분야를 포함한 대부분의 생명공학 분야에서 적용돼왔으며, 특히 미생물 공학에 중점을 두고 연구가 진행됐다. 다양한 발효 식품과 알코올음료 생산 등, 미생물을 사용한 물질 생산은 오랜 역사가 있다. 미생물은 동식물에 비해 빠르게 자랄 수 있어 실험에 드는 시간과 비용이 적게 든다. 또한 유전자 변형 생물(Genetically Modified Organism; GMO) 관련한 윤리 및 안정성 문제에서 동식물과 비교해 미생물의 유전공학은 상대적으로 자유로워 미생물에 관한 대사공학 연구가 광범위하게 시행돼왔다.
지난 수십 년간 대사공학은 유용한 화학물질을 효율적으로 생산하고, 분해가 어려운 오염 물질을 분해할 수 있는 미생물 균주를 성공적으로 개발하는 등, 지속 가능한 발전을 위한 핵심적인 기술로서의 면모를 보여왔다. 특히, 현재까지 대사공학을 통해 개발한 미생물은 재생 가능한 바이오매스로부터 바이오 연료, 바이오 플라스틱, 산업용 대량 화학물질, 화장품 성분 및 의약품까지 수백 가지의 화학물질이 생산을 가능케 했다.
또한, 대사공학은 미생물과 곤충을 포함한 동식물의 자연적 정화 과정에서 영감을 얻어 미생물 기반의 다양한 생물학적 정화 방법을 개발하기 위해 사용돼왔다. 오염 물질과 독성 화학물질의 분해 경로를 조작함으로써 유출된 기름, 폐플라스틱, 살충제, 폐기된 항생제와 같은 물질을 더 높은 효율로 분해할 수 있도록 미생물을 개량할 수 있고, 이는 환경 보존을 위한 연구의 초석으로서 대사공학이 인류 건강에 기여하는 중요 예시다. 이처럼 대사공학은 유엔이 발표한 지속가능발전목표(Sustainable Development Goals; SDG) 달성에 다방면으로 기여하고 있다.
연구팀은 이번 연구에서 지난 30년간 대사 공학이 발전하며 어떻게 바이오 기반 화학물질의 지속 가능한 생산, 인류 건강 및 환경 문제까지 기여했는지에 대한 광범위한 개요를 제공했다. 특히 이상엽 특훈교수는 대사공학의 태동기부터 연구를 수행해 왔으며 2000년대 들어서 두드러진 합성생물학의 발전과도 함께해 왔다. 연구팀은 이번 논문을 통해 대사공학의 출현부터 인공지능을 활용한 최신 기술의 도입까지, 지난 수십 년 동안 어떻게 사회적, 산업적, 기술적 요구를 해결하기 위해 어떻게 발전해왔는지 정리하고, 최근 대사공학 연구가 어떻게 산업용 대량 화학물질 생산, 바이오 연료 생산, 천연물 생산, 생물학적 정화 분야에 기여하고 있는지 논의했다. 나아가 건강 및 환경 문제의 해결과 지속 가능한 바이오 기반의 화학산업을 정착시키기 위해 극복해야 할 대사공학의 문제점을 함께 제시했다.
공동 제1 저자인 생명화학공학과 김기배 박사과정생은 “기존의 석유화학 공정 기반의 화학물질 생산으로 인한 기후 위기와 화석 연료 고갈 문제를 고려했을 때 대사공학을 이용한 화학물질의 지속 가능한 생산 연구는 더욱 중요해지고 있다”라고 말했으며, 이상엽 특훈교수는 “이번 연구에서 대사공학의 역사를 돌이켜봄으로써 대사공학의 지속가능발전목표를 달성하기 위한 기여를 조명했으며, 우리 사회가 직면한 기후 위기, 환경 오염, 헬스케어, 식량 및 에너지 부족 문제에 대한 해결책으로서 대사공학이 점점 더 중요한 역할을 할 것”이라고 밝혔다.
한편, 이번 연구는 과기정통부가 지원하는 석유대체 친환경 화학기술개발사업의 바이오화학산업 선도를 위한 차세대 바이오리파이너리 원천기술 개발 과제, 바이오·의료기술개발사업의 맞춤형 세포공장 기반 유해선충제어 바이오소재 기술 개발 과제, 그리고 산업통상자원부가 지원하는 e바이오리파이너리 직접공기포집 C1전환 합성생물학의 통합 과제의 지원을 받아 수행됐다.
바이오경제를 이끌어가는 대사공학 30년 역사와 미래
우리 대학 생명화학공학과 이상엽 특훈교수 연구팀이 지난 30년간 대사공학이 발전해온 역사를 정리해, 대사공학이 어떻게 지속 가능한 발전에 기여할 수 있는 분석한 결과를 정리하여 ‘지속 가능성과 건강을 위한 대사공학’ 논문으로 발표했다고 25일 밝혔다. 이번 논문은 셀(Cell) 誌가 발행하는 생명공학 분야 권위 리뷰 저널인 `생명공학 동향(Trends in Biotechnology)'의 40주년 특집호 온라인판에 게재됐다.
※ 논문명 : Metabolic engineering for sustainability and health
※ 저자 정보 : 김기배(한국과학기술원, 공동 제1 저자), 최소영(한국과학기술원, 공동 제1 저자), 조인진(한국과학기술원, 공동 제1 저자), 안다희(한국과학기술원), 이상엽(한국과학기술원, 교신저자) 포함 총 5명
대사공학은 1990년대 초반부터 본격적으로 연구되어 지난 30년간 괄목할 만한 발전을 이뤘다. 대사공학은 산업, 의료, 농업 및 환경 분야를 포함한 대부분의 생명공학 분야에서 적용돼왔으며, 특히 미생물 공학에 중점을 두고 연구가 진행됐다. 다양한 발효 식품과 알코올음료 생산 등, 미생물을 사용한 물질 생산은 오랜 역사가 있다. 미생물은 동식물에 비해 빠르게 자랄 수 있어 실험에 드는 시간과 비용이 적게 든다. 또한 유전자 변형 생물(Genetically Modified Organism; GMO) 관련한 윤리 및 안정성 문제에서 동식물과 비교해 미생물의 유전공학은 상대적으로 자유로워 미생물에 관한 대사공학 연구가 광범위하게 시행돼왔다.
지난 수십 년간 대사공학은 유용한 화학물질을 효율적으로 생산하고, 분해가 어려운 오염 물질을 분해할 수 있는 미생물 균주를 성공적으로 개발하는 등, 지속 가능한 발전을 위한 핵심적인 기술로서의 면모를 보여왔다. 특히, 현재까지 대사공학을 통해 개발한 미생물은 재생 가능한 바이오매스로부터 바이오 연료, 바이오 플라스틱, 산업용 대량 화학물질, 화장품 성분 및 의약품까지 수백 가지의 화학물질이 생산을 가능케 했다.
또한, 대사공학은 미생물과 곤충을 포함한 동식물의 자연적 정화 과정에서 영감을 얻어 미생물 기반의 다양한 생물학적 정화 방법을 개발하기 위해 사용돼왔다. 오염 물질과 독성 화학물질의 분해 경로를 조작함으로써 유출된 기름, 폐플라스틱, 살충제, 폐기된 항생제와 같은 물질을 더 높은 효율로 분해할 수 있도록 미생물을 개량할 수 있고, 이는 환경 보존을 위한 연구의 초석으로서 대사공학이 인류 건강에 기여하는 중요 예시다. 이처럼 대사공학은 유엔이 발표한 지속가능발전목표(Sustainable Development Goals; SDG) 달성에 다방면으로 기여하고 있다.
연구팀은 이번 연구에서 지난 30년간 대사 공학이 발전하며 어떻게 바이오 기반 화학물질의 지속 가능한 생산, 인류 건강 및 환경 문제까지 기여했는지에 대한 광범위한 개요를 제공했다. 특히 이상엽 특훈교수는 대사공학의 태동기부터 연구를 수행해 왔으며 2000년대 들어서 두드러진 합성생물학의 발전과도 함께해 왔다. 연구팀은 이번 논문을 통해 대사공학의 출현부터 인공지능을 활용한 최신 기술의 도입까지, 지난 수십 년 동안 어떻게 사회적, 산업적, 기술적 요구를 해결하기 위해 어떻게 발전해왔는지 정리하고, 최근 대사공학 연구가 어떻게 산업용 대량 화학물질 생산, 바이오 연료 생산, 천연물 생산, 생물학적 정화 분야에 기여하고 있는지 논의했다. 나아가 건강 및 환경 문제의 해결과 지속 가능한 바이오 기반의 화학산업을 정착시키기 위해 극복해야 할 대사공학의 문제점을 함께 제시했다.
공동 제1 저자인 생명화학공학과 김기배 박사과정생은 “기존의 석유화학 공정 기반의 화학물질 생산으로 인한 기후 위기와 화석 연료 고갈 문제를 고려했을 때 대사공학을 이용한 화학물질의 지속 가능한 생산 연구는 더욱 중요해지고 있다”라고 말했으며, 이상엽 특훈교수는 “이번 연구에서 대사공학의 역사를 돌이켜봄으로써 대사공학의 지속가능발전목표를 달성하기 위한 기여를 조명했으며, 우리 사회가 직면한 기후 위기, 환경 오염, 헬스케어, 식량 및 에너지 부족 문제에 대한 해결책으로서 대사공학이 점점 더 중요한 역할을 할 것”이라고 밝혔다.
한편, 이번 연구는 과기정통부가 지원하는 석유대체 친환경 화학기술개발사업의 바이오화학산업 선도를 위한 차세대 바이오리파이너리 원천기술 개발 과제, 바이오·의료기술개발사업의 맞춤형 세포공장 기반 유해선충제어 바이오소재 기술 개발 과제, 그리고 산업통상자원부가 지원하는 e바이오리파이너리 직접공기포집 C1전환 합성생물학의 통합 과제의 지원을 받아 수행됐다.
2023.01.25
조회수 10810
-
 인공지능으로 정확한 세포 이미지 분석..세계 AI 생명과학 분야 대회 우승
우리 대학 김재철AI대학원 윤세영 교수 연구팀이 세계 최고 수준의 인공지능(AI) 학회인 `뉴립스(NeurIPS, 신경정보처리시스템학회) 2022'에서 개최된 `세포 인식기술 경진대회'에서 취리히 리서치센터, 베이징대, 칭화대, 미시간대 등 다수의 세계 연구팀을 모두 제치고 1위로 우승을 달성했다고 28일 밝혔다.
뉴립스는 국제머신러닝학회(ICML), 표현학습국제학회(ICLR)와 함께 세계적인 권위의 기계학습 및 인공지능 분야 학회로 꼽힌다. 뛰어난 연구자들이 제출하는 논문들도 승인될 확률이 25%에 불과할 정도로 학회의 심사를 통과하기 어려운 것으로 알려져 있다.
윤세영 교수 연구팀은 이번 학회에서 `세포 인식기술 경진대회(Cell Segmentation Challenge)'에 참가했다. 이기훈(박사과정), 김상묵(박사과정), 김준기(석사과정)의 3명의 연구원으로 구성된 OSILAB 팀은 초고해상도의 현미경 이미지에서 인공지능이 자동으로 세포를 인식하는 MEDIAR(메디아) 기술을 개발해 2위 팀과 큰 성능 격차로 1위를 달성했다.
세포 인식은 생명 및 의료 분야의 시작이 되는 중요한 기반 기술이지만, 현미경의 측정 기술과 세포의 종류 등에 따라 다양한 형태로 관찰될 수 있어 인공지능이 학습하기 어려운 분야로 알려져 있다. 세포 인식기술 경진대회는 이러한 한계를 극복하기 위해 초고해상도의 현미경 이미지에서 제한된 시간 안에 세포를 인식하는 기술을 주제로 개최됐다.
연구팀은 기계학습에서 소수의 학습 데이터를 더 효과적으로 활용해 성능을 높이는 데이터 기반(Data-Centric) 접근법과 인공신경망의 구조를 개선하는 모델 기반(Model-Centric) 접근법을 종합적으로 활용해 MEDIAR(메디아) 기술을 개발했다. 개발된 인공지능 기술을 통해 정확하게 세포를 인식하고 고해상도 이미지를 빠르게 연산함으로써 대회에서 좋은 성과를 얻을 수 있었다. 지도교수인 KAIST 김재철AI대학원 윤세영 교수는 “MEDIAR는 세포 인식기술 경진대회를 통해 개발됐지만 기상 예측이나 자율주행과 같이 이미지 속 다양한 형태의 개체 인식을 통해 정확한 예측이 필요한 많은 분야에 적용할 수 있다”라고 향후 다양한 활용을 기대했다.
팀을 이끌었던 이기훈 박사과정은 "처음 접하는 분야에서도 성과를 낼 수 있었던 것은 평소 기본기를 중요시하는 교수님의 가르침 덕분ˮ이라며 "새로운 문제에 끊임없이 도전하자는 것이 연구팀의 기본 정신ˮ이라고 강조했다. 이어 같은 연구실 김상묵 박사과정은 "연구 과정에서 많은 실패가 있었지만, 세상에 꼭 필요한 기술이라는 생각으로 끝까지 노력했다ˮ라며 "혼자서라면 절대 해내지 못했던 결과인 만큼 팀원들에게 정말 감사하다ˮ라고 수상 소감을 전했다. 같은 연구실 김준기 석사과정은 "팀원들과 이룬 성과가 의료 분야 인공지능이 겪는 현실의 문제를 해결하는 데 도움이 될 수 있기를 바란다”라고 밝혔다.
연구팀은 생명과학 분야 연구의 발전을 돕기 위해 개발된 기술을 전면 오픈소스로 공개한다고 밝혔다. 학습된 인공지능 모델과 인공지능을 구현하기 위한 프로그램의 소스 코드는 개발자 플랫폼인 깃허브 (GitHub)를 통해 이용할 수 있다.
인공지능으로 정확한 세포 이미지 분석..세계 AI 생명과학 분야 대회 우승
우리 대학 김재철AI대학원 윤세영 교수 연구팀이 세계 최고 수준의 인공지능(AI) 학회인 `뉴립스(NeurIPS, 신경정보처리시스템학회) 2022'에서 개최된 `세포 인식기술 경진대회'에서 취리히 리서치센터, 베이징대, 칭화대, 미시간대 등 다수의 세계 연구팀을 모두 제치고 1위로 우승을 달성했다고 28일 밝혔다.
뉴립스는 국제머신러닝학회(ICML), 표현학습국제학회(ICLR)와 함께 세계적인 권위의 기계학습 및 인공지능 분야 학회로 꼽힌다. 뛰어난 연구자들이 제출하는 논문들도 승인될 확률이 25%에 불과할 정도로 학회의 심사를 통과하기 어려운 것으로 알려져 있다.
윤세영 교수 연구팀은 이번 학회에서 `세포 인식기술 경진대회(Cell Segmentation Challenge)'에 참가했다. 이기훈(박사과정), 김상묵(박사과정), 김준기(석사과정)의 3명의 연구원으로 구성된 OSILAB 팀은 초고해상도의 현미경 이미지에서 인공지능이 자동으로 세포를 인식하는 MEDIAR(메디아) 기술을 개발해 2위 팀과 큰 성능 격차로 1위를 달성했다.
세포 인식은 생명 및 의료 분야의 시작이 되는 중요한 기반 기술이지만, 현미경의 측정 기술과 세포의 종류 등에 따라 다양한 형태로 관찰될 수 있어 인공지능이 학습하기 어려운 분야로 알려져 있다. 세포 인식기술 경진대회는 이러한 한계를 극복하기 위해 초고해상도의 현미경 이미지에서 제한된 시간 안에 세포를 인식하는 기술을 주제로 개최됐다.
연구팀은 기계학습에서 소수의 학습 데이터를 더 효과적으로 활용해 성능을 높이는 데이터 기반(Data-Centric) 접근법과 인공신경망의 구조를 개선하는 모델 기반(Model-Centric) 접근법을 종합적으로 활용해 MEDIAR(메디아) 기술을 개발했다. 개발된 인공지능 기술을 통해 정확하게 세포를 인식하고 고해상도 이미지를 빠르게 연산함으로써 대회에서 좋은 성과를 얻을 수 있었다. 지도교수인 KAIST 김재철AI대학원 윤세영 교수는 “MEDIAR는 세포 인식기술 경진대회를 통해 개발됐지만 기상 예측이나 자율주행과 같이 이미지 속 다양한 형태의 개체 인식을 통해 정확한 예측이 필요한 많은 분야에 적용할 수 있다”라고 향후 다양한 활용을 기대했다.
팀을 이끌었던 이기훈 박사과정은 "처음 접하는 분야에서도 성과를 낼 수 있었던 것은 평소 기본기를 중요시하는 교수님의 가르침 덕분ˮ이라며 "새로운 문제에 끊임없이 도전하자는 것이 연구팀의 기본 정신ˮ이라고 강조했다. 이어 같은 연구실 김상묵 박사과정은 "연구 과정에서 많은 실패가 있었지만, 세상에 꼭 필요한 기술이라는 생각으로 끝까지 노력했다ˮ라며 "혼자서라면 절대 해내지 못했던 결과인 만큼 팀원들에게 정말 감사하다ˮ라고 수상 소감을 전했다. 같은 연구실 김준기 석사과정은 "팀원들과 이룬 성과가 의료 분야 인공지능이 겪는 현실의 문제를 해결하는 데 도움이 될 수 있기를 바란다”라고 밝혔다.
연구팀은 생명과학 분야 연구의 발전을 돕기 위해 개발된 기술을 전면 오픈소스로 공개한다고 밝혔다. 학습된 인공지능 모델과 인공지능을 구현하기 위한 프로그램의 소스 코드는 개발자 플랫폼인 깃허브 (GitHub)를 통해 이용할 수 있다.
2022.12.28
조회수 12253
-
 세계 최고 빠른 속도로 철제 벽면과 천장을 보행하는 사족 로봇 개발
우리 대학 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다. (논문명 : Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot)
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 *535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8킬로그램(kg)의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
*535N을 kg으로 환산하면 54.5kg, 445N을 kg으로 환산하면 45.4kg이다. 즉, 수직 방향으로 최대 54.5kg, 수평 방향으로는 최대 45.4kg 정도의 외력이 가해져도 (혹은 이에 해당하는 무게 추가 매달려도) 발바닥이 철판에서 떨어지지 않는다.
연구팀이 제작한 사족 보행 로봇은 초속 70센티미터(cm)의 속도로 직벽을 고속 등반하였고, 최대 초속 50센티미터(cm)의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35센티미터(cm)의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5센티미터(cm) 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 "영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다ˮ라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
세계 최고 빠른 속도로 철제 벽면과 천장을 보행하는 사족 로봇 개발
우리 대학 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다. (논문명 : Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot)
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 *535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8킬로그램(kg)의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
*535N을 kg으로 환산하면 54.5kg, 445N을 kg으로 환산하면 45.4kg이다. 즉, 수직 방향으로 최대 54.5kg, 수평 방향으로는 최대 45.4kg 정도의 외력이 가해져도 (혹은 이에 해당하는 무게 추가 매달려도) 발바닥이 철판에서 떨어지지 않는다.
연구팀이 제작한 사족 보행 로봇은 초속 70센티미터(cm)의 속도로 직벽을 고속 등반하였고, 최대 초속 50센티미터(cm)의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35센티미터(cm)의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5센티미터(cm) 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 "영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다ˮ라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
2022.12.26
조회수 11252
-
 상호작용 가능한 바이오 기반 친환경 화학물질 합성지도 완성
우리 대학 생명화학공학과 이상엽 특훈교수 연구팀이 미생물에서 화학물질을 생산하기 위한 바이오 화학반응을 총망라한 웹 기반의 합성 지도를 완성했다고 29일 밝혔다. 이번 연구는 국제학술지인 `생명공학 동향(Trends in Biotechnology)'에 8월 10일 字 게재됐다.
※ 논문명 : An interactive metabolic map of bio-based chemicals
※ 저자 정보 : 장우대(한국과학기술원, 공동 제1 저자), 김기배(한국과학기술원, 공동 제1 저자), 이상엽(한국과학기술원, 교신저자) 포함 총 3명
급격한 기후 변화와 환경오염에 대응하기 위해 석유화학 제품을 미생물을 활용해 생산하는 연구가 주목받고 있다. 미생물을 이용해 다양한 화학 물질, 재료, 연료 등을 합성하기 위해선 목표 물질의 생합성 경로를 탐색 및 발굴해 미생물 내에 도입하는 것이 우선돼야 한다. 또한, 다양한 화학물질을 효율적으로 합성하기 위해선 미생물을 이용한 생물공학적 방법뿐만 아닌 화학적 방법 또한 통합해 활용할 필요가 있다.
지난 2019년, 이상엽 특훈교수팀은 미생물을 이용해 화학물질을 합성할 수 있는 경로를 기존 화학반응 공정과 함께 정리한 지도를 국제학술지 ‘네이처 카탈리시스(Nature Catalysis)’에 발표한 바 있다. 당시 편찬한 지도는 네이처 측에서 포스터 형식으로 전 세계의 산업계 및 학계에 배포해 각 화학물질의 합성 경로를 한눈에 확인할 수 있도록 했다.
연구팀은 전 세계적인 관심을 바탕으로 지난번에 공개한 바이오 기반 화학물질 합성 지도를 업데이트 및 확장하고, 웹 기반으로 제작해 누구나 쉽게 접근하여 각 화학물질 합성을 위한 효율적인 경로를 빠르게 탐색할 수 있도록 했다. 사용자는 개발한 웹 기반의 합성 지도에서 제공하는 대화형 시각적 도구를 사용해 다양한 화학물질 생산으로 이어지는 생물학적 및 화학적 반응의 복잡한 네트워크를 분석할 수 있다. 또한, 이번 개편에서는 식품, 의약품, 화장품 등에 활용할 수 있는 다양한 천연물과 그 합성 경로를 추가해 지도의 활용성을 넓혔다. 발표한 바이오 기반 화학물질 합성지도는 http://systemsbiotech.co.kr 에서 확인할 수 있다.
공동 제1 저자인 생명화학공학과 장우대 박사와 김기배 박사과정생은 “기존 배포했던 합성 지도의 업데이트와 사용성 증대에 대한 요구를 반영하여 이번 연구를 진행했다”라고 말했으며, “이번 논문에서 정리한 생물공학적 방법과 화학공학적 방법을 통합한 화학물질 생산 전략과 전망은 미생물 세포 공장 구축 시 화학물질의 합성 경로 설계뿐만 아닌, 신규 물질의 생합성 경로 설계에도 유용하게 활용할 것으로 기대된다”라고 밝혔다.
이상엽 특훈교수는 “이번 연구에서 업데이트한 웹 기반 합성 지도는 기후 위기와 탄소중립에 대응하기 위한 바이오 기반 화학물질 생산 연구의 청사진으로서 역할을 할 것”이라고 밝혔다.
한편, 이번 연구는 과기정통부가 지원하는 석유대체 친환경 화학기술개발사업의 바이오화학산업 선도를 위한 차세대 바이오리파이너리 원천기술 개발 과제 지원을 받아 수행됐다.
상호작용 가능한 바이오 기반 친환경 화학물질 합성지도 완성
우리 대학 생명화학공학과 이상엽 특훈교수 연구팀이 미생물에서 화학물질을 생산하기 위한 바이오 화학반응을 총망라한 웹 기반의 합성 지도를 완성했다고 29일 밝혔다. 이번 연구는 국제학술지인 `생명공학 동향(Trends in Biotechnology)'에 8월 10일 字 게재됐다.
※ 논문명 : An interactive metabolic map of bio-based chemicals
※ 저자 정보 : 장우대(한국과학기술원, 공동 제1 저자), 김기배(한국과학기술원, 공동 제1 저자), 이상엽(한국과학기술원, 교신저자) 포함 총 3명
급격한 기후 변화와 환경오염에 대응하기 위해 석유화학 제품을 미생물을 활용해 생산하는 연구가 주목받고 있다. 미생물을 이용해 다양한 화학 물질, 재료, 연료 등을 합성하기 위해선 목표 물질의 생합성 경로를 탐색 및 발굴해 미생물 내에 도입하는 것이 우선돼야 한다. 또한, 다양한 화학물질을 효율적으로 합성하기 위해선 미생물을 이용한 생물공학적 방법뿐만 아닌 화학적 방법 또한 통합해 활용할 필요가 있다.
지난 2019년, 이상엽 특훈교수팀은 미생물을 이용해 화학물질을 합성할 수 있는 경로를 기존 화학반응 공정과 함께 정리한 지도를 국제학술지 ‘네이처 카탈리시스(Nature Catalysis)’에 발표한 바 있다. 당시 편찬한 지도는 네이처 측에서 포스터 형식으로 전 세계의 산업계 및 학계에 배포해 각 화학물질의 합성 경로를 한눈에 확인할 수 있도록 했다.
연구팀은 전 세계적인 관심을 바탕으로 지난번에 공개한 바이오 기반 화학물질 합성 지도를 업데이트 및 확장하고, 웹 기반으로 제작해 누구나 쉽게 접근하여 각 화학물질 합성을 위한 효율적인 경로를 빠르게 탐색할 수 있도록 했다. 사용자는 개발한 웹 기반의 합성 지도에서 제공하는 대화형 시각적 도구를 사용해 다양한 화학물질 생산으로 이어지는 생물학적 및 화학적 반응의 복잡한 네트워크를 분석할 수 있다. 또한, 이번 개편에서는 식품, 의약품, 화장품 등에 활용할 수 있는 다양한 천연물과 그 합성 경로를 추가해 지도의 활용성을 넓혔다. 발표한 바이오 기반 화학물질 합성지도는 http://systemsbiotech.co.kr 에서 확인할 수 있다.
공동 제1 저자인 생명화학공학과 장우대 박사와 김기배 박사과정생은 “기존 배포했던 합성 지도의 업데이트와 사용성 증대에 대한 요구를 반영하여 이번 연구를 진행했다”라고 말했으며, “이번 논문에서 정리한 생물공학적 방법과 화학공학적 방법을 통합한 화학물질 생산 전략과 전망은 미생물 세포 공장 구축 시 화학물질의 합성 경로 설계뿐만 아닌, 신규 물질의 생합성 경로 설계에도 유용하게 활용할 것으로 기대된다”라고 밝혔다.
이상엽 특훈교수는 “이번 연구에서 업데이트한 웹 기반 합성 지도는 기후 위기와 탄소중립에 대응하기 위한 바이오 기반 화학물질 생산 연구의 청사진으로서 역할을 할 것”이라고 밝혔다.
한편, 이번 연구는 과기정통부가 지원하는 석유대체 친환경 화학기술개발사업의 바이오화학산업 선도를 위한 차세대 바이오리파이너리 원천기술 개발 과제 지원을 받아 수행됐다.
2022.08.29
조회수 10468
-
 디지털 펜으로 ´쓱쓱´ 그려 움직이는 3D 형상 ´뚝딱´ 만드는 시스템 개발
우리 대학 산업디자인학과 배석형 교수 연구팀이 종이 위에 그림을 그리는 듯한 펜 드로잉과 장난감을 손으로 다루는 듯한 멀티터치 제스처만으로 `움직이는 3D 스케치'를 쉽고 빠르게 만들 수 있는 새로운 시스템을 개발했다고 18일 밝혔다.
한때 공상과학 영화의 전유물이었으나 기술의 발전 덕분에 일상에서도 접할 수 있게 된 접이식 드론, 변신형 자동차, 다족 보행 로봇처럼 여러 움직이는 부분과 관절로 이뤄진 제품은 디자인할 때 형태뿐만 아니라 구조, 자세, 동작까지 동시에 고려해야 하므로 전문가도 많은 어려움을 겪는다.
기존의 3D 캐드(CAD) 소프트웨어는 정교한 형상 작업에 특화돼 있어 움직이는 모델 하나를 제작하는 데에도 많은 시간과 노력을 요구하는데, 특히 이는 다양한 가능성을 넓고 빠르게 탐색해야 하는 디자인 초기 과정에서 심각한 병목과 비용을 초래한다.
반면, 배 교수 연구팀은 모든 디자인은 종이 위에 펜으로 빠르게 그린 2D 스케치로부터 출발한다는 점에 주목하고 디자이너가 디지털 태블릿 위에 디지털 펜으로 자유롭게 표현한 2D 스케치로부터 입체 형상을 생성하는 `3D 스케칭' 기술을 개발해 왔다.
이번 연구에서 연구팀은 생성 중인 3D 스케치를 마치 장난감을 다루듯 두 손으로 조작할 수 있는 직관적인 멀티터치 제스처를 설계 및 구현함으로써 순식간에 살아 움직이는 입체 형상을 만들 수 있는 `움직이는 3D 스케칭' 기술을 완성했다(그림 1, 2).
우리 대학 산업디자인학과 이준협 박사과정 학생이 제1 저자로 참여한 해당 연구는 컴퓨터 그래픽스 분야 제1위 국제 학술지인 `ACM 트랜잭션 온 그래픽스(ACM Transactions on Graphics, 피인용지수: 7.403)'에 게재됐으며, 이와 연동돼 8월 초 캐나다 밴쿠버에서 개최된 최대 규모의 국제학술대회인 ACM 시그래프 2022(ACM SIGGRAPH 2022, h5-색인: 103)에 발표됐다(논문명: Rapid Design of Articulated Objects).
이번 시그래프(이하 SIGGRAPH)에는 전 세계 유수의 대학교 연구진, 마블(Marvel), 픽사(Pixar), 블리자드(Blizzard)와 같은 세계적인 애니메이션 사, 영화사, 게임사, 록히드 마틴(Lockheed Martin), 보스턴 다이내믹스(Boston Dynamics)와 같은 첨단 제조사를 비롯해, 메타(Meta), 로블록스(Roblox)와 같은 메타버스 관련 기업 관계자 1만여 명이 참가한 것으로 알려졌다.
배 교수 연구팀의 기술 논문(Technical Paper) 성과는 SIGGRAPH에서 유망한 신기술을 현장에서 시연하는 `이머징 테크놀로지(Emerging Technologies)' 프로그램에 초청됐을 뿐만 아니라, 그중에서도 Top 3 우수 기술로 선정, 특별 강연으로 소개됐다. 제2 저자인 KAIST 산업디자인학과 김한빛 박사과정 학생이 불과 10분 만에 유려한 형태의 동물 로봇을 그리고 움직여서 입체 동영상을 완성하는 모습은 현장에 모인 청중의 감탄을 자아냈고 심사위원단이 선정한 우수 전시상(Honorable Mention)을 수상하는 영광을 얻었다(그림 3).
이번 SIGGRAPH에서 기조연설을 맡은 에드윈 캐트멀(Edwin Catmull) 픽사 공동 창업자 / 前 회장도 이 연구를 두고 "매우 훌륭한 업적이자(really excellent work), 픽사의 창의력 넘치는 디자이너들에게 필요한 도구(the kind of tool that would be useful to Pixar's creative model designers)ˮ라며 높이 평가했다.
연구를 지도한 배석형 교수는 "디자이너가 생각하고 작업하는 방식에 가까이 다가갈수록 효과적인 디자인 도구를 만들 수 있다ˮ며, "직관적인 상호작용 방식을 통해 여러 상이한 알고리즘을 하나의 조화로운 시스템으로 통합하는 것이 핵심ˮ이라고 강조했다. 또한 "학생 개개인이 디자이너인 동시에 엔지니어를 지향하는 KAIST 산업디자인학과만의 융합적인 토양이기에 가능한 연구였다ˮ고 덧붙였다.
3D 공간에서 자유자재로 움직이는 입체 형상과 같은 수준 높은 창의적 결과물을 기존 방식에 비교할 수 없을 만큼 쉽고 빠르게 생성할 수 있어서 가까운 미래에 콘텐츠 산업, 제조 산업, 나아가 메타버스 산업의 디자인 실무 혁신에 크게 기여할 것으로 기대된다.
한편, 이번 연구는 과학기술정보통신부 및 한국연구재단의 지원을 받아 수행됐다.
- 웹사이트(다양한 움직이는 3D 스케치 예시 수록): https://sketch.kaist.ac.kr/publications/2022_siggraph_rapid_design
- ACM SIGGRAPH 2022 특별 강연(한글 자막 있음): https://www.youtube.com/watch?v=rsBl0QvSDqI
디지털 펜으로 ´쓱쓱´ 그려 움직이는 3D 형상 ´뚝딱´ 만드는 시스템 개발
우리 대학 산업디자인학과 배석형 교수 연구팀이 종이 위에 그림을 그리는 듯한 펜 드로잉과 장난감을 손으로 다루는 듯한 멀티터치 제스처만으로 `움직이는 3D 스케치'를 쉽고 빠르게 만들 수 있는 새로운 시스템을 개발했다고 18일 밝혔다.
한때 공상과학 영화의 전유물이었으나 기술의 발전 덕분에 일상에서도 접할 수 있게 된 접이식 드론, 변신형 자동차, 다족 보행 로봇처럼 여러 움직이는 부분과 관절로 이뤄진 제품은 디자인할 때 형태뿐만 아니라 구조, 자세, 동작까지 동시에 고려해야 하므로 전문가도 많은 어려움을 겪는다.
기존의 3D 캐드(CAD) 소프트웨어는 정교한 형상 작업에 특화돼 있어 움직이는 모델 하나를 제작하는 데에도 많은 시간과 노력을 요구하는데, 특히 이는 다양한 가능성을 넓고 빠르게 탐색해야 하는 디자인 초기 과정에서 심각한 병목과 비용을 초래한다.
반면, 배 교수 연구팀은 모든 디자인은 종이 위에 펜으로 빠르게 그린 2D 스케치로부터 출발한다는 점에 주목하고 디자이너가 디지털 태블릿 위에 디지털 펜으로 자유롭게 표현한 2D 스케치로부터 입체 형상을 생성하는 `3D 스케칭' 기술을 개발해 왔다.
이번 연구에서 연구팀은 생성 중인 3D 스케치를 마치 장난감을 다루듯 두 손으로 조작할 수 있는 직관적인 멀티터치 제스처를 설계 및 구현함으로써 순식간에 살아 움직이는 입체 형상을 만들 수 있는 `움직이는 3D 스케칭' 기술을 완성했다(그림 1, 2).
우리 대학 산업디자인학과 이준협 박사과정 학생이 제1 저자로 참여한 해당 연구는 컴퓨터 그래픽스 분야 제1위 국제 학술지인 `ACM 트랜잭션 온 그래픽스(ACM Transactions on Graphics, 피인용지수: 7.403)'에 게재됐으며, 이와 연동돼 8월 초 캐나다 밴쿠버에서 개최된 최대 규모의 국제학술대회인 ACM 시그래프 2022(ACM SIGGRAPH 2022, h5-색인: 103)에 발표됐다(논문명: Rapid Design of Articulated Objects).
이번 시그래프(이하 SIGGRAPH)에는 전 세계 유수의 대학교 연구진, 마블(Marvel), 픽사(Pixar), 블리자드(Blizzard)와 같은 세계적인 애니메이션 사, 영화사, 게임사, 록히드 마틴(Lockheed Martin), 보스턴 다이내믹스(Boston Dynamics)와 같은 첨단 제조사를 비롯해, 메타(Meta), 로블록스(Roblox)와 같은 메타버스 관련 기업 관계자 1만여 명이 참가한 것으로 알려졌다.
배 교수 연구팀의 기술 논문(Technical Paper) 성과는 SIGGRAPH에서 유망한 신기술을 현장에서 시연하는 `이머징 테크놀로지(Emerging Technologies)' 프로그램에 초청됐을 뿐만 아니라, 그중에서도 Top 3 우수 기술로 선정, 특별 강연으로 소개됐다. 제2 저자인 KAIST 산업디자인학과 김한빛 박사과정 학생이 불과 10분 만에 유려한 형태의 동물 로봇을 그리고 움직여서 입체 동영상을 완성하는 모습은 현장에 모인 청중의 감탄을 자아냈고 심사위원단이 선정한 우수 전시상(Honorable Mention)을 수상하는 영광을 얻었다(그림 3).
이번 SIGGRAPH에서 기조연설을 맡은 에드윈 캐트멀(Edwin Catmull) 픽사 공동 창업자 / 前 회장도 이 연구를 두고 "매우 훌륭한 업적이자(really excellent work), 픽사의 창의력 넘치는 디자이너들에게 필요한 도구(the kind of tool that would be useful to Pixar's creative model designers)ˮ라며 높이 평가했다.
연구를 지도한 배석형 교수는 "디자이너가 생각하고 작업하는 방식에 가까이 다가갈수록 효과적인 디자인 도구를 만들 수 있다ˮ며, "직관적인 상호작용 방식을 통해 여러 상이한 알고리즘을 하나의 조화로운 시스템으로 통합하는 것이 핵심ˮ이라고 강조했다. 또한 "학생 개개인이 디자이너인 동시에 엔지니어를 지향하는 KAIST 산업디자인학과만의 융합적인 토양이기에 가능한 연구였다ˮ고 덧붙였다.
3D 공간에서 자유자재로 움직이는 입체 형상과 같은 수준 높은 창의적 결과물을 기존 방식에 비교할 수 없을 만큼 쉽고 빠르게 생성할 수 있어서 가까운 미래에 콘텐츠 산업, 제조 산업, 나아가 메타버스 산업의 디자인 실무 혁신에 크게 기여할 것으로 기대된다.
한편, 이번 연구는 과학기술정보통신부 및 한국연구재단의 지원을 받아 수행됐다.
- 웹사이트(다양한 움직이는 3D 스케치 예시 수록): https://sketch.kaist.ac.kr/publications/2022_siggraph_rapid_design
- ACM SIGGRAPH 2022 특별 강연(한글 자막 있음): https://www.youtube.com/watch?v=rsBl0QvSDqI
2022.08.18
조회수 14068
-
 상용 디젤로부터 수소 생산 가능한 개질 촉매 개발
우리 대학 기계공학과 배중면 교수, 이강택 교수와 한국에너지기술연구원(KIER) 이찬우 박사 공동 연구팀이 상용 디젤로부터 수소 생산이 가능한 고활성, 고내구성 디젤 개질 촉매 개발에 성공했다고 16일 밝혔다.
연료 개질(fuel reforming)은 탄화수소로부터 촉매 반응을 통해 수소를 추출하는 수소 생산 기술이다. 액체 연료인 디젤은 수소 저장 밀도가 높고 운반과 저장이 쉽다는 장점이 있어 디젤 개질을 통한 수소 공급 장치를 헤비트럭의 보조전원장치, 잠수함의 공기불요추진체계 등 모바일 연료전지 시스템에 적용하고자 하는 연구가 지속돼왔다.
그러나 디젤은 고 탄화수소의 혼합물로 긴 사슬 구조의 파라핀, 이중 결합을 갖는 올레핀, 벤젠 고리 구조를 갖는 방향족 탄화수소를 포함하고 있어 고 탄화수소를 효과적으로 분해하기 위한 높은 활성도의 촉매가 요구된다. 그뿐 아니라, 촉매의 성능 저하 요인인 코킹 및 열 소결에 대해 강한 내구성을 갖는 촉매가 요구돼 디젤 개질 기술 활용에 어려움을 겪어왔다.
연구팀은 용출(산화물 지지체에 이온 형태로 고용시킨 활금속을 열처리를 통해 금속나노입자 형태로 지지체 상에 고르게 성장시키는 방법) 현상을 통해 합금 나노입자를 형성하도록 촉매를 설계함으로써 고활성, 고내구성 디젤 개질 촉매를 개발하는 데 성공했다. 용출된 금속 나노입자는 지지체와 강한 상호작용을 갖는 특성이 있어 고온에서 높은 분산도를 유지할 수 있고, 이종 금속 간 합금을 형성해 상승효과로 촉매 성능 향상을 노릴 수 있다는 점에서 착안했다.
연구팀은 산화환원반응 촉매의 지지체로 흔히 쓰이는 세리아(CeO2)의 격자 내 백금(Pt)과 루테늄(Ru)을 미량 침투시킨 다성분계 촉매를 제조하기 위해 용액 연소 합성법을 도입했다. 이 촉매는 디젤 개질 반응 환경에 노출되었을 때 백금과 루테늄이 지지체 표면으로 용출된 후 백금-루테늄 합금 나노입자를 형성한다.
연구팀은 촉매 분석뿐만 아니라 밀도범함수 이론 기반 계산을 통해 활금속의 용출 및 합금 형성에 대한 거동을 에너지적 관점에서 규명하는데 성공했다. 백금-루테늄 합금 촉매를 사용해 기존 단일 금속 촉매와 개질 성능을 비교해 본 결과, 개질 활성도가 향상돼 저온(600oC, 기존 800oC)에서도 100%의 연료전환율을 보였으며, 장기 내구성 평가(800oC, 200시간)에서 성능 열화 없이 상용 안정적으로 상용 디젤로부터 수소를 생산하는데 성공했다.
우리 대학 기계공학과 이재명 박사과정이 제1 저자로, 한국에너지기술연구원 연창호 박사과정, 기계공학과 오지우 박사, 한국에너지기술연구원 한광우 박사, 기계공학과 유정도 박사, 한국기초과학지원연구원 윤형중 박사가 공저자로 참여했으며, 한국에너지기술연구원 이찬우 박사, 기계공학과 이강택 교수, 배중면 교수가 교신저자로 참여한 이번 연구는 환경·재료·화학 분야 국제 학술지 `어플라이드 카탈리시스 비: 인바이러멘탈, Applied Catalysis B: Environmental'(IF 24.319, JCR분야 0.93%)에 지난 6월 17일 字 온라인판에 게재됐다(논문명: Highly Active and Stable Catalyst with Exsolved PtRu Alloy Nanoparticles for Hydrogen Production via Commercial Diesel Reforming).
배중면 교수는 "상용 디젤로부터 수소를 안정적으로 생산할 수 있다는 점에서 매우 의미있는 성과이며, 초기 수소 경제 사회에서 모바일 연료전지 시스템의 활용성 제고에 크게 이바지할 것으로 기대된다ˮ며, "이번 연구에서의 촉매 설계에 대한 접근법은 개질 반응뿐만 아니라 다양한 분야에서 응용 및 적용될 수 있을 것이다ˮ라고 말했다.
이번 연구는 과학기술정보통신부의 재원으로 한국연구재단의 지원을 받아 수행됐다.
상용 디젤로부터 수소 생산 가능한 개질 촉매 개발
우리 대학 기계공학과 배중면 교수, 이강택 교수와 한국에너지기술연구원(KIER) 이찬우 박사 공동 연구팀이 상용 디젤로부터 수소 생산이 가능한 고활성, 고내구성 디젤 개질 촉매 개발에 성공했다고 16일 밝혔다.
연료 개질(fuel reforming)은 탄화수소로부터 촉매 반응을 통해 수소를 추출하는 수소 생산 기술이다. 액체 연료인 디젤은 수소 저장 밀도가 높고 운반과 저장이 쉽다는 장점이 있어 디젤 개질을 통한 수소 공급 장치를 헤비트럭의 보조전원장치, 잠수함의 공기불요추진체계 등 모바일 연료전지 시스템에 적용하고자 하는 연구가 지속돼왔다.
그러나 디젤은 고 탄화수소의 혼합물로 긴 사슬 구조의 파라핀, 이중 결합을 갖는 올레핀, 벤젠 고리 구조를 갖는 방향족 탄화수소를 포함하고 있어 고 탄화수소를 효과적으로 분해하기 위한 높은 활성도의 촉매가 요구된다. 그뿐 아니라, 촉매의 성능 저하 요인인 코킹 및 열 소결에 대해 강한 내구성을 갖는 촉매가 요구돼 디젤 개질 기술 활용에 어려움을 겪어왔다.
연구팀은 용출(산화물 지지체에 이온 형태로 고용시킨 활금속을 열처리를 통해 금속나노입자 형태로 지지체 상에 고르게 성장시키는 방법) 현상을 통해 합금 나노입자를 형성하도록 촉매를 설계함으로써 고활성, 고내구성 디젤 개질 촉매를 개발하는 데 성공했다. 용출된 금속 나노입자는 지지체와 강한 상호작용을 갖는 특성이 있어 고온에서 높은 분산도를 유지할 수 있고, 이종 금속 간 합금을 형성해 상승효과로 촉매 성능 향상을 노릴 수 있다는 점에서 착안했다.
연구팀은 산화환원반응 촉매의 지지체로 흔히 쓰이는 세리아(CeO2)의 격자 내 백금(Pt)과 루테늄(Ru)을 미량 침투시킨 다성분계 촉매를 제조하기 위해 용액 연소 합성법을 도입했다. 이 촉매는 디젤 개질 반응 환경에 노출되었을 때 백금과 루테늄이 지지체 표면으로 용출된 후 백금-루테늄 합금 나노입자를 형성한다.
연구팀은 촉매 분석뿐만 아니라 밀도범함수 이론 기반 계산을 통해 활금속의 용출 및 합금 형성에 대한 거동을 에너지적 관점에서 규명하는데 성공했다. 백금-루테늄 합금 촉매를 사용해 기존 단일 금속 촉매와 개질 성능을 비교해 본 결과, 개질 활성도가 향상돼 저온(600oC, 기존 800oC)에서도 100%의 연료전환율을 보였으며, 장기 내구성 평가(800oC, 200시간)에서 성능 열화 없이 상용 안정적으로 상용 디젤로부터 수소를 생산하는데 성공했다.
우리 대학 기계공학과 이재명 박사과정이 제1 저자로, 한국에너지기술연구원 연창호 박사과정, 기계공학과 오지우 박사, 한국에너지기술연구원 한광우 박사, 기계공학과 유정도 박사, 한국기초과학지원연구원 윤형중 박사가 공저자로 참여했으며, 한국에너지기술연구원 이찬우 박사, 기계공학과 이강택 교수, 배중면 교수가 교신저자로 참여한 이번 연구는 환경·재료·화학 분야 국제 학술지 `어플라이드 카탈리시스 비: 인바이러멘탈, Applied Catalysis B: Environmental'(IF 24.319, JCR분야 0.93%)에 지난 6월 17일 字 온라인판에 게재됐다(논문명: Highly Active and Stable Catalyst with Exsolved PtRu Alloy Nanoparticles for Hydrogen Production via Commercial Diesel Reforming).
배중면 교수는 "상용 디젤로부터 수소를 안정적으로 생산할 수 있다는 점에서 매우 의미있는 성과이며, 초기 수소 경제 사회에서 모바일 연료전지 시스템의 활용성 제고에 크게 이바지할 것으로 기대된다ˮ며, "이번 연구에서의 촉매 설계에 대한 접근법은 개질 반응뿐만 아니라 다양한 분야에서 응용 및 적용될 수 있을 것이다ˮ라고 말했다.
이번 연구는 과학기술정보통신부의 재원으로 한국연구재단의 지원을 받아 수행됐다.
2022.08.16
조회수 11070
-
 스마트폰 위 인공지능(AI) 연합학습 속도 4.5배 획기적 향상기법 개발
우리 대학 전기및전자공학부 이성주 교수 연구팀이 국제공동연구를 통해 다수의 모바일 기기 위에서 인공지능(AI) 모델을 학습할 수 있는 연합학습 기술의 학습 속도를 4.5배 가속할 수 있는 방법론을 개발했다고 2일 밝혔다.
이성주 교수 연구팀은 지난 6/27~7/1에 열린 세계컴퓨터연합회(ACM) 주최로 진행된 제20회 모바일 시스템, 어플리케이션, 및 서비스 국제학술대회(MobiSys, International Conference on Mobile Systems, Applications, and Services)에서 연합학습(Federated Learning)의 학습 속도 향상(4.5배 가속)을 위한 데이터 샘플 최적 선택 및 데드라인 조절 방법론을 발표했다. 이 학회는 2003년에 시작됐으며 모바일 시스템, 소프트웨어, 어플리케이션, 서비스를 위한 최신 연구를 소개하는 데 초점을 맞추고 있으며, 모바일 컴퓨팅 및 시스템 분야의 최우수 학회 중 하나로 오랫동안 주목받고 있다.
이번 논문(FedBalancer: Data and Pace Control for Efficient Federated Learning on Heterogeneous Clients)은 KAIST 전산학부 신재민 박사과정이 제1 저자로 참여했으며, 중국 칭화대학과의 국제협력으로 이루어진 성과다 (칭화대학교 위안춘 리(Yuanchun Li) 교수, 윤신 리우(Yunxin Liu) 교수 참여).
최근 구글에 의해 제안된 연합학습은 새로운 기계학습 기술로, 개인정보의 유출 없이 방대한 사용자 기기 위 데이터를 활용할 수 있게 하여 의료 인공지능 기술 등 새로운 인공지능 서비스를 개발할 수 있게 해 각광받고 있다. 연합학습은 구글을 비롯해 애플, 타오바오 등 세계적 빅테크 기업들이 널리 도입하고 있으나, 실제로는 인공지능 모델 학습이 사용자의 스마트폰 위에서 이뤄져, 기기에 과부하를 일으켜 배터리 소모, 성능 저하 등이 발생할 수 있는 우려를 안고 있다.
이성주 교수 연구팀은 연합학습에 참여하는 사용자 기기 위 데이터 샘플 각각의 학습 기여도 측정을 기반으로 최적의 샘플을 선택함으로써 연합학습 속도 향상을 달성했다. 또한, 샘플 선택으로 줄어든 학습 시간에 대응해, 연합학습 라운드의 데드라인 또한 최적으로 조절하는 기법을 제안해 모델 정확도의 저하 없이 학습 속도를 무려 4.5배 높였다. 이러한 방법론의 적용을 통해 연합학습으로 인한 사용자 스마트폰 과부하 문제를 최소화할 수 있을 것으로 기대된다.
이성주 교수는 "연합학습은 많은 세계적 기업들이 사용하는 중요한 기술이다ˮ며 "이번 연구 결과는 연합학습의 학습 속도를 향상하고 활용도를 높여 의미가 있으며, 컴퓨터 비전, 자연어 처리, 모바일 센서 데이터 등 다양한 응용에서 모두 좋은 성능을 보여, 빠른 파급효과를 기대한다ˮ라고 소감을 밝혔다.
한편 이 연구는 과학기술정보통신부의 재원으로 한국연구재단과 정보통신기술진흥센터의 지원을 받아 수행됐다.
스마트폰 위 인공지능(AI) 연합학습 속도 4.5배 획기적 향상기법 개발
우리 대학 전기및전자공학부 이성주 교수 연구팀이 국제공동연구를 통해 다수의 모바일 기기 위에서 인공지능(AI) 모델을 학습할 수 있는 연합학습 기술의 학습 속도를 4.5배 가속할 수 있는 방법론을 개발했다고 2일 밝혔다.
이성주 교수 연구팀은 지난 6/27~7/1에 열린 세계컴퓨터연합회(ACM) 주최로 진행된 제20회 모바일 시스템, 어플리케이션, 및 서비스 국제학술대회(MobiSys, International Conference on Mobile Systems, Applications, and Services)에서 연합학습(Federated Learning)의 학습 속도 향상(4.5배 가속)을 위한 데이터 샘플 최적 선택 및 데드라인 조절 방법론을 발표했다. 이 학회는 2003년에 시작됐으며 모바일 시스템, 소프트웨어, 어플리케이션, 서비스를 위한 최신 연구를 소개하는 데 초점을 맞추고 있으며, 모바일 컴퓨팅 및 시스템 분야의 최우수 학회 중 하나로 오랫동안 주목받고 있다.
이번 논문(FedBalancer: Data and Pace Control for Efficient Federated Learning on Heterogeneous Clients)은 KAIST 전산학부 신재민 박사과정이 제1 저자로 참여했으며, 중국 칭화대학과의 국제협력으로 이루어진 성과다 (칭화대학교 위안춘 리(Yuanchun Li) 교수, 윤신 리우(Yunxin Liu) 교수 참여).
최근 구글에 의해 제안된 연합학습은 새로운 기계학습 기술로, 개인정보의 유출 없이 방대한 사용자 기기 위 데이터를 활용할 수 있게 하여 의료 인공지능 기술 등 새로운 인공지능 서비스를 개발할 수 있게 해 각광받고 있다. 연합학습은 구글을 비롯해 애플, 타오바오 등 세계적 빅테크 기업들이 널리 도입하고 있으나, 실제로는 인공지능 모델 학습이 사용자의 스마트폰 위에서 이뤄져, 기기에 과부하를 일으켜 배터리 소모, 성능 저하 등이 발생할 수 있는 우려를 안고 있다.
이성주 교수 연구팀은 연합학습에 참여하는 사용자 기기 위 데이터 샘플 각각의 학습 기여도 측정을 기반으로 최적의 샘플을 선택함으로써 연합학습 속도 향상을 달성했다. 또한, 샘플 선택으로 줄어든 학습 시간에 대응해, 연합학습 라운드의 데드라인 또한 최적으로 조절하는 기법을 제안해 모델 정확도의 저하 없이 학습 속도를 무려 4.5배 높였다. 이러한 방법론의 적용을 통해 연합학습으로 인한 사용자 스마트폰 과부하 문제를 최소화할 수 있을 것으로 기대된다.
이성주 교수는 "연합학습은 많은 세계적 기업들이 사용하는 중요한 기술이다ˮ며 "이번 연구 결과는 연합학습의 학습 속도를 향상하고 활용도를 높여 의미가 있으며, 컴퓨터 비전, 자연어 처리, 모바일 센서 데이터 등 다양한 응용에서 모두 좋은 성능을 보여, 빠른 파급효과를 기대한다ˮ라고 소감을 밝혔다.
한편 이 연구는 과학기술정보통신부의 재원으로 한국연구재단과 정보통신기술진흥센터의 지원을 받아 수행됐다.
2022.08.02
조회수 13693
-
 천 개~수천만 개 이상의 대규모 사물인터넷 동시 통신기술 최초 개발
우리 대학 전기및전자공학부 김성민 교수 연구팀이 세계 최초로 천 개에서 수천만 개에 이르는 대규모 사물인터넷(IoT) 동시 통신을 위한 `밀리미터파 후방산란 시스템'을 개발했다고 28일 밝혔다.
밀리미터파 후방산란 기술은 대규모 통신을 지원하기 위한 기술로 주목받고 있다. 밀리미터파 통신은 30~300기가헤르츠(GHz)의 반송파 주파수 대역을 활용하는 통신으로, 5G/6G 등 표준에서 도입을 준비 중인 차세대 통신 기술이다. 이는 넓은 주파수 대역폭(10GHz 이상)을 확보할 수 있어 높은 확장성을 제공한다.
또한, 후방산란 기술은 기기가 직접 무선 신호를 생성하지 않고 공중에 존재하는 무선 신호를 반사해 정보를 전달하는 방식으로, 무선 신호를 생성하는데 전력을 소모하지 않기 때문에 초저전력 통신을 가능하게 할 수 있는 기술이다. 이는 낮은 설치비용으로 대규모 사물인터넷 기기의 광범위한 인터넷 연결성을 제공할 수 있다.
김성민 교수 연구팀은 밀리미터파 후방산란을 이용해 수천만 개의 사물인터넷 기기들이 실내에 배치된 복잡한 통신 환경에서 모든 신호가 동시에 복조되도록 설계하는 데 성공했다.
전기및전자공학부 배강민 박사과정이 제1 저자로 참여한 이번 연구는 모바일 시스템 분야의 최고 권위 국제 학술대회인 `ACM 모비시스(ACM MobiSys)' 2022에 이번 6월 발표됐으며, 최우수논문상을 수상했다. (논문명: OmniScatter: extreme sensitivity mmWave backscattering using commodity FMCW radar). 이는 작년 우리 대학 전기및전자공학부에서 아시아 대학 최초로 ACM 모비시스 2021 최우수논문상을 받은 이후 연속된 수상으로 더욱 의미가 깊다.
5G/6G 네트워크의 핵심 구성 요소 중 하나인 사물인터넷은 기하급수적인 성장세를 보이고 있으며, 2035년까지 1조 개 이상의 기기가 생산될 전망이다. 대규모 사물인터넷 기기들의 인터넷 연결을 지원하기 위해서 5G, 6G 표준 각각 4G 대비 10배 및 100배의 네트워크 밀도를 지원하는 것을 목표로 하고 있다. 따라서, 대규모 통신을 위한 실용적인 시스템의 필요성이 대두되고 있다.
그러나 현재 밀리미터 후방산란 시스템은 밀리미터파의 높은 주파수에 따른 신호 감쇄와 후방산란 시스템의 반사 손실이 합쳐져 제한적인 환경에서만 통신이 가능하다. 즉, 다양한 장애물과 반사체가 설치된 복잡한 통신 환경에서 작동하지 않아 상대적으로 자유로운 설치가 필요한 대규모 사물인터넷 기기에 광범위한 인터넷 연결성을 제공하는 데 한계가 있다.
연구팀은 FMCW(주파수 변조 연속파) 레이더의 높은 코딩 이득에서 해답을 찾았다. 연구팀은 레이더의 코딩 이득을 그대로 유지하는 동시에, 후방산란 신호와 주변 잡음을 원천적으로 분리해내는 신호 처리 방법을 개발해 기존 FMCW 레이더 대비 십만 배 이상 개선된 수신감도를 달성했다. 이는 실용적인 환경에서의 통신을 지원한다. 더욱이, 연구팀은 태그의 물리적인 위치에 따라 복조된 신호의 주파수가 달라지는 레이더 특성을 활용해 위치에 따라 통신 채널을 자연적으로 할당 받는 후방산란 시스템을 설계했다. 이는 초저전력 후방산란 통신이 10GHz 이상의 밀리미터파 주파수 대역폭을 전부 활용할 수 있게 하여 수천만 사물인터넷 기기들의 동시 통신을 지원한다.
개발된 시스템은 상용 기성품 레이더를 게이트웨이로 활용할 수 있어 적용 용이성이 높다. 또한, 연구팀의 후방산란 기술은 10마이크로와트(μW) 이하의 초저전력으로 작동해 코인 전지 하나로 40년 이상 구동 가능해 설치 및 유지보수 비용을 크게 줄일 수 있다.
연구팀은 다양한 장애물과 반사체가 설치된 사무실 환경에 무작위로 설치된 밀리미터파 후방산란 기기들의 통신이 가능함을 확인했다. 나아가 연구팀은 실험을 통해 총 1,100개의 기기가 송신하는 정보를 동시에 수신하는 것이 가능함을 확인하여 대규모 사물인터넷 구동을 검증했다.
이번 성과는 5G/6G 등 차세대 통신에서 요구하는 네트워크 밀도를 훨씬 웃도는 연결성을 자랑한다. 이에, 이번 시스템은 향후 도래할 초연결 시대를 위한 디딤돌 역할을 할 수 있을 것으로 기대된다.
김성민 교수는 "밀리미터파 후방산란은 대규모로 사물인터넷 기기들을 구동할 수 있는 꿈의 기술이며 이는 기존 어떠한 기술보다도 더욱 대규모의 통신을 초저전력으로 구동할 수 있다ˮ라며 "이 기술이 앞으로 도래할 초연결 시대에 사물인터넷의 보급을 위해 적극적으로 활용되길 기대한다ˮ라고 말했다.
한편 이번 연구는 삼성미래기술육성사업과 정보통신기획평가원의 지원을 받아 수행됐다.
천 개~수천만 개 이상의 대규모 사물인터넷 동시 통신기술 최초 개발
우리 대학 전기및전자공학부 김성민 교수 연구팀이 세계 최초로 천 개에서 수천만 개에 이르는 대규모 사물인터넷(IoT) 동시 통신을 위한 `밀리미터파 후방산란 시스템'을 개발했다고 28일 밝혔다.
밀리미터파 후방산란 기술은 대규모 통신을 지원하기 위한 기술로 주목받고 있다. 밀리미터파 통신은 30~300기가헤르츠(GHz)의 반송파 주파수 대역을 활용하는 통신으로, 5G/6G 등 표준에서 도입을 준비 중인 차세대 통신 기술이다. 이는 넓은 주파수 대역폭(10GHz 이상)을 확보할 수 있어 높은 확장성을 제공한다.
또한, 후방산란 기술은 기기가 직접 무선 신호를 생성하지 않고 공중에 존재하는 무선 신호를 반사해 정보를 전달하는 방식으로, 무선 신호를 생성하는데 전력을 소모하지 않기 때문에 초저전력 통신을 가능하게 할 수 있는 기술이다. 이는 낮은 설치비용으로 대규모 사물인터넷 기기의 광범위한 인터넷 연결성을 제공할 수 있다.
김성민 교수 연구팀은 밀리미터파 후방산란을 이용해 수천만 개의 사물인터넷 기기들이 실내에 배치된 복잡한 통신 환경에서 모든 신호가 동시에 복조되도록 설계하는 데 성공했다.
전기및전자공학부 배강민 박사과정이 제1 저자로 참여한 이번 연구는 모바일 시스템 분야의 최고 권위 국제 학술대회인 `ACM 모비시스(ACM MobiSys)' 2022에 이번 6월 발표됐으며, 최우수논문상을 수상했다. (논문명: OmniScatter: extreme sensitivity mmWave backscattering using commodity FMCW radar). 이는 작년 우리 대학 전기및전자공학부에서 아시아 대학 최초로 ACM 모비시스 2021 최우수논문상을 받은 이후 연속된 수상으로 더욱 의미가 깊다.
5G/6G 네트워크의 핵심 구성 요소 중 하나인 사물인터넷은 기하급수적인 성장세를 보이고 있으며, 2035년까지 1조 개 이상의 기기가 생산될 전망이다. 대규모 사물인터넷 기기들의 인터넷 연결을 지원하기 위해서 5G, 6G 표준 각각 4G 대비 10배 및 100배의 네트워크 밀도를 지원하는 것을 목표로 하고 있다. 따라서, 대규모 통신을 위한 실용적인 시스템의 필요성이 대두되고 있다.
그러나 현재 밀리미터 후방산란 시스템은 밀리미터파의 높은 주파수에 따른 신호 감쇄와 후방산란 시스템의 반사 손실이 합쳐져 제한적인 환경에서만 통신이 가능하다. 즉, 다양한 장애물과 반사체가 설치된 복잡한 통신 환경에서 작동하지 않아 상대적으로 자유로운 설치가 필요한 대규모 사물인터넷 기기에 광범위한 인터넷 연결성을 제공하는 데 한계가 있다.
연구팀은 FMCW(주파수 변조 연속파) 레이더의 높은 코딩 이득에서 해답을 찾았다. 연구팀은 레이더의 코딩 이득을 그대로 유지하는 동시에, 후방산란 신호와 주변 잡음을 원천적으로 분리해내는 신호 처리 방법을 개발해 기존 FMCW 레이더 대비 십만 배 이상 개선된 수신감도를 달성했다. 이는 실용적인 환경에서의 통신을 지원한다. 더욱이, 연구팀은 태그의 물리적인 위치에 따라 복조된 신호의 주파수가 달라지는 레이더 특성을 활용해 위치에 따라 통신 채널을 자연적으로 할당 받는 후방산란 시스템을 설계했다. 이는 초저전력 후방산란 통신이 10GHz 이상의 밀리미터파 주파수 대역폭을 전부 활용할 수 있게 하여 수천만 사물인터넷 기기들의 동시 통신을 지원한다.
개발된 시스템은 상용 기성품 레이더를 게이트웨이로 활용할 수 있어 적용 용이성이 높다. 또한, 연구팀의 후방산란 기술은 10마이크로와트(μW) 이하의 초저전력으로 작동해 코인 전지 하나로 40년 이상 구동 가능해 설치 및 유지보수 비용을 크게 줄일 수 있다.
연구팀은 다양한 장애물과 반사체가 설치된 사무실 환경에 무작위로 설치된 밀리미터파 후방산란 기기들의 통신이 가능함을 확인했다. 나아가 연구팀은 실험을 통해 총 1,100개의 기기가 송신하는 정보를 동시에 수신하는 것이 가능함을 확인하여 대규모 사물인터넷 구동을 검증했다.
이번 성과는 5G/6G 등 차세대 통신에서 요구하는 네트워크 밀도를 훨씬 웃도는 연결성을 자랑한다. 이에, 이번 시스템은 향후 도래할 초연결 시대를 위한 디딤돌 역할을 할 수 있을 것으로 기대된다.
김성민 교수는 "밀리미터파 후방산란은 대규모로 사물인터넷 기기들을 구동할 수 있는 꿈의 기술이며 이는 기존 어떠한 기술보다도 더욱 대규모의 통신을 초저전력으로 구동할 수 있다ˮ라며 "이 기술이 앞으로 도래할 초연결 시대에 사물인터넷의 보급을 위해 적극적으로 활용되길 기대한다ˮ라고 말했다.
한편 이번 연구는 삼성미래기술육성사업과 정보통신기획평가원의 지원을 받아 수행됐다.
2022.07.28
조회수 9053
-
 사람처럼 느끼고 상처 치유가 가능한 로봇 피부 기술 개발
우리 대학 기계공학과 김정 교수 연구팀이 메사추세츠 공과대학(MIT), 슈투트가르트 대학교(Univ. of Stuttgart)의 연구자들과 공동연구를 통해 `넓은 면적에 대해 다양한 외부 촉각 자극을 인지할 수 있으며, 칼로 베어져도 다시 기능을 회복할 수 있는 로봇 피부 기술'을 개발했다고 9일 밝혔다.
기계공학과 박경서 박사가 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)'에 6월 9일 출판됐다. (논문명: A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for tactile sensing)
사람의 가장 큰 장기인 피부는 내부를 충격에서 보호함과 동시에 주위로부터의 물리적인 자극을 전달하는 통로다. 피부를 이용한 정보 전달(혹은 촉감)은 표면 인식, 조작, 쓰다듬기, 꼬집기, 포옹, 몸싸움 등으로 종류가 다양하며, 피부가 덮은 모든 부분에서 느낄 수 있기에 풍부한 비언어적 감정 표현과 교류를 가능하게 한다. 그래서 촉각은 `한 인간이 세계를 탐구하는 첫 번째 수단'이라고도 한다.
그러나, 로봇 분야의 비약적인 발전에도 불구하고 로봇 대부분은 딱딱한 소재의 외피를 가지며, 인간과의 물리적 교류를 터치스크린과 같은 특정한 부위로 제한하고 있다. 그 이유는 현재의 로봇 촉각 기술로는 `인간의 피부처럼 부드러운 물성과 복잡한 3차원 형상을 가지고, 동시에 섬세한 촉각 정보를 수용하는 것이 가능한 로봇 피부'를 개발하지 못하기 때문이다. 또한, 사람의 피부는 날카로운 물체에 베여 절상 혹은 열상이 발생하더라도 신축성과 기능을 회복하는 이른바 치유 기능을 하고 있으며, 이는 현대 기술로 재현하는 것이 매우 어렵다. 따라서, 사람과 로봇의 다양한 수준의 물리적 접촉을 중재하기 위해 부드러운 물성을 가지면서 다양한 3차원 형상을 덮을 수 있는 대면적 촉각 로봇 피부 기술이 필요하다.
김정 교수 연구팀은 이러한 로봇 피부를 만들기 위해 생체모사 다층구조와 단층촬영법을 활용했다. 이 기술들은 인간 피부의 구조와 촉각수용기의 특징과 구성 방식을 모사해, 적은 수의 측정 요소만으로도 넓은 3차원 표면 영역에서 정적 압력(약 0~15Hz) 및 동적 진동 (약 15~500Hz)을 실시간으로 감지 및 국지화하는 것을 가능케 했다. 기존의 터치스크린 기술은 해상도를 높일수록 필요한 측정점의 수가 증가하는 데 비해, 이번 기술은 넓은 수용영역을 갖는 측정 요소들을 겹치게 배치해 수십 개의 측정 요소만으로도 넓은 측정 영역을 달성할 수 있다.
연구팀은 측정된 촉감 신호를 인공지능 신경망으로 처리함으로써, 촉각 자극의 종류(누르기, 두드리기, 쓰다듬기 등)를 분류하는 것도 가능함을 선보였다. 더 나아가, 개발된 로봇 피부는 부드러운 소재(하이드로젤, 실리콘)로 만들어져 충격 흡수가 가능하고, 날카로운 물체에 의해 깊게 찢어지거나 베여도 피부의 구조와 기능을 손쉽게 회복하는 것이 가능했다.
연구진은 본 기술이 넓은 부위에 정교한 촉각 감각뿐만 아니라 사람의 피부와 유사한 물성과 질감도 부여할 수 있으므로, 서비스 로봇과 같이 사람과의 다양한 접촉과 상호작용이 필요한 응용 분야에 유용하게 활용될 것으로 기대했다. 예를 들면 점점 대중화되는 식당 서빙 로봇이나 인간형 로봇에 적용할 수 있다. 더 나아가, 로봇 피부를 의수/의족의 피부로 사용한다면 실제 사람의 손/다리와 똑같은 외형과 촉감 감각을 절단 환자들에게 제공할 수도 있다. 또한 인간형 로봇이 사람과 똑같은 기능과 외형의 피부를 가지고, 상처가 나더라도 피부의 기능을 복구하는 치유 능력을 갖게 할 수도 있다.
기계공학과 김정 교수는 "이번 연구를 통해 인간과 로봇이 같은 공간에 공존하기 위한 필수 기술인 대면적 로봇 촉각 피부를 개발했을 뿐만 아니라 현재 기술보다 월등한 사람의 피부감각 혹은 촉각의 성능에 비견할 만한 기술을 구현한 데 큰 의의가 있다ˮ라고 밝혔다.
한편, 이번 연구는 한국연구재단 중견연구자지원사업의 지원을 받아 수행됐으며,ᅠKAIST 기계공학과 양민진, 조준휘 박사과정과 메사추세츠 공과대학(MIT)의 육현우 박사, 슈투트가르트 대학교(Univ. of Stuttgart)의 이효상 교수가 공동연구자로 참여했다.
동영상 1: 로봇 피부 촉각 시연 (https://youtu.be/3T8dX32fo6U)
동영상 2: 로봇 피부 촉감 인식 시연 (https://youtu.be/CViv1oLo_Ec)
동영상 3: 로봇 피부 절개 및 복구 시연 (https://youtu.be/vsllVFM9yS4)
동영상 4: 로봇피부의 미용의수에의 적용 (https://youtu.be/qR1msF0FDTA)
사람처럼 느끼고 상처 치유가 가능한 로봇 피부 기술 개발
우리 대학 기계공학과 김정 교수 연구팀이 메사추세츠 공과대학(MIT), 슈투트가르트 대학교(Univ. of Stuttgart)의 연구자들과 공동연구를 통해 `넓은 면적에 대해 다양한 외부 촉각 자극을 인지할 수 있으며, 칼로 베어져도 다시 기능을 회복할 수 있는 로봇 피부 기술'을 개발했다고 9일 밝혔다.
기계공학과 박경서 박사가 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)'에 6월 9일 출판됐다. (논문명: A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for tactile sensing)
사람의 가장 큰 장기인 피부는 내부를 충격에서 보호함과 동시에 주위로부터의 물리적인 자극을 전달하는 통로다. 피부를 이용한 정보 전달(혹은 촉감)은 표면 인식, 조작, 쓰다듬기, 꼬집기, 포옹, 몸싸움 등으로 종류가 다양하며, 피부가 덮은 모든 부분에서 느낄 수 있기에 풍부한 비언어적 감정 표현과 교류를 가능하게 한다. 그래서 촉각은 `한 인간이 세계를 탐구하는 첫 번째 수단'이라고도 한다.
그러나, 로봇 분야의 비약적인 발전에도 불구하고 로봇 대부분은 딱딱한 소재의 외피를 가지며, 인간과의 물리적 교류를 터치스크린과 같은 특정한 부위로 제한하고 있다. 그 이유는 현재의 로봇 촉각 기술로는 `인간의 피부처럼 부드러운 물성과 복잡한 3차원 형상을 가지고, 동시에 섬세한 촉각 정보를 수용하는 것이 가능한 로봇 피부'를 개발하지 못하기 때문이다. 또한, 사람의 피부는 날카로운 물체에 베여 절상 혹은 열상이 발생하더라도 신축성과 기능을 회복하는 이른바 치유 기능을 하고 있으며, 이는 현대 기술로 재현하는 것이 매우 어렵다. 따라서, 사람과 로봇의 다양한 수준의 물리적 접촉을 중재하기 위해 부드러운 물성을 가지면서 다양한 3차원 형상을 덮을 수 있는 대면적 촉각 로봇 피부 기술이 필요하다.
김정 교수 연구팀은 이러한 로봇 피부를 만들기 위해 생체모사 다층구조와 단층촬영법을 활용했다. 이 기술들은 인간 피부의 구조와 촉각수용기의 특징과 구성 방식을 모사해, 적은 수의 측정 요소만으로도 넓은 3차원 표면 영역에서 정적 압력(약 0~15Hz) 및 동적 진동 (약 15~500Hz)을 실시간으로 감지 및 국지화하는 것을 가능케 했다. 기존의 터치스크린 기술은 해상도를 높일수록 필요한 측정점의 수가 증가하는 데 비해, 이번 기술은 넓은 수용영역을 갖는 측정 요소들을 겹치게 배치해 수십 개의 측정 요소만으로도 넓은 측정 영역을 달성할 수 있다.
연구팀은 측정된 촉감 신호를 인공지능 신경망으로 처리함으로써, 촉각 자극의 종류(누르기, 두드리기, 쓰다듬기 등)를 분류하는 것도 가능함을 선보였다. 더 나아가, 개발된 로봇 피부는 부드러운 소재(하이드로젤, 실리콘)로 만들어져 충격 흡수가 가능하고, 날카로운 물체에 의해 깊게 찢어지거나 베여도 피부의 구조와 기능을 손쉽게 회복하는 것이 가능했다.
연구진은 본 기술이 넓은 부위에 정교한 촉각 감각뿐만 아니라 사람의 피부와 유사한 물성과 질감도 부여할 수 있으므로, 서비스 로봇과 같이 사람과의 다양한 접촉과 상호작용이 필요한 응용 분야에 유용하게 활용될 것으로 기대했다. 예를 들면 점점 대중화되는 식당 서빙 로봇이나 인간형 로봇에 적용할 수 있다. 더 나아가, 로봇 피부를 의수/의족의 피부로 사용한다면 실제 사람의 손/다리와 똑같은 외형과 촉감 감각을 절단 환자들에게 제공할 수도 있다. 또한 인간형 로봇이 사람과 똑같은 기능과 외형의 피부를 가지고, 상처가 나더라도 피부의 기능을 복구하는 치유 능력을 갖게 할 수도 있다.
기계공학과 김정 교수는 "이번 연구를 통해 인간과 로봇이 같은 공간에 공존하기 위한 필수 기술인 대면적 로봇 촉각 피부를 개발했을 뿐만 아니라 현재 기술보다 월등한 사람의 피부감각 혹은 촉각의 성능에 비견할 만한 기술을 구현한 데 큰 의의가 있다ˮ라고 밝혔다.
한편, 이번 연구는 한국연구재단 중견연구자지원사업의 지원을 받아 수행됐으며,ᅠKAIST 기계공학과 양민진, 조준휘 박사과정과 메사추세츠 공과대학(MIT)의 육현우 박사, 슈투트가르트 대학교(Univ. of Stuttgart)의 이효상 교수가 공동연구자로 참여했다.
동영상 1: 로봇 피부 촉각 시연 (https://youtu.be/3T8dX32fo6U)
동영상 2: 로봇 피부 촉감 인식 시연 (https://youtu.be/CViv1oLo_Ec)
동영상 3: 로봇 피부 절개 및 복구 시연 (https://youtu.be/vsllVFM9yS4)
동영상 4: 로봇피부의 미용의수에의 적용 (https://youtu.be/qR1msF0FDTA)
2022.06.09
조회수 14854