%EA%B8%B0%EA%B3%84%EA%B3%B5%ED%95%99%EA%B3%BC
-
 기계공학과 윤국진 교수 연구팀, 세계 최고 권위 컴퓨터비전 국제학술대회 ICCV 2025에 논문 12편 채택
우리 대학 기계공학과 윤국진 교수 연구팀의 논문 12편이 세계 최고 권위 컴퓨터비전 국제 학술 대회 중 하나인 IEEE/CVF International Conference on Computer Vision 2025(ICCV 2025)에 채택되어, 연구팀의 독보적인 연구 역량을 다시 한번 국제적으로 인정받았다.
ICCV는 CVPR, ECCV와 함께 컴퓨터비전 및 인공지능 분야에서 가장 영향력 있는 국제 학술대회 중 하나로, 1987년부터 격년으로 개최되어 왔다. 이번 ICCV 2025에는 총 11,152편의 논문이 제출되었고, 이 중 2,698편이 채택되어 약 24.19%의 낮은 채택률을 기록하였다. 학술대회에 제출할 수 있는 논문 편수에 대한 제한이 있음에도 불구하고 단일 연구실에서 12편의 논문이 동시 채택되는 것은 매우 드문 성과다.
윤국진 교수 연구팀은 학습 기반의 시각 지능 구현을 목표로 연구를 진행하고 있으며, 이번에 발표된 12편의 논문들은 3D 객체 탐지 및 재구성, 동작 예측 및 계획, 악천후나 모션 블러와 같은 극한 환경에서의 영상 인식 및 개선, 테스트 시점 적응 및 멀티태스크 학습, 4D 맵을 활용한 재구성과 같은 컴퓨터비전 분야의 핵심 주제들에 대한 논문들이다.
특히 연구팀은 지난해 CVPR 2024와 ECCV 2024에서도 각각 9편과 12편의 논문을 발표하여 학계의 주목을 받은 바 있는데, 이번 ICCV 2025에서의 성과를 통해 전 세계 컴퓨터 비전 분야의 선두 연구실로서 입지를 더욱 확고히 했다. 연구팀은 앞으로도 도전적인 연구를 이어가며 학문적·기술적 한계를 확장해 나갈 계획이다.
ICCV 2025는 오는 10월 19일부터 23일까지 미국 하와이 호놀룰루에서 개최될 예정이다.
2025.06.30 조회수 301
기계공학과 윤국진 교수 연구팀, 세계 최고 권위 컴퓨터비전 국제학술대회 ICCV 2025에 논문 12편 채택
우리 대학 기계공학과 윤국진 교수 연구팀의 논문 12편이 세계 최고 권위 컴퓨터비전 국제 학술 대회 중 하나인 IEEE/CVF International Conference on Computer Vision 2025(ICCV 2025)에 채택되어, 연구팀의 독보적인 연구 역량을 다시 한번 국제적으로 인정받았다.
ICCV는 CVPR, ECCV와 함께 컴퓨터비전 및 인공지능 분야에서 가장 영향력 있는 국제 학술대회 중 하나로, 1987년부터 격년으로 개최되어 왔다. 이번 ICCV 2025에는 총 11,152편의 논문이 제출되었고, 이 중 2,698편이 채택되어 약 24.19%의 낮은 채택률을 기록하였다. 학술대회에 제출할 수 있는 논문 편수에 대한 제한이 있음에도 불구하고 단일 연구실에서 12편의 논문이 동시 채택되는 것은 매우 드문 성과다.
윤국진 교수 연구팀은 학습 기반의 시각 지능 구현을 목표로 연구를 진행하고 있으며, 이번에 발표된 12편의 논문들은 3D 객체 탐지 및 재구성, 동작 예측 및 계획, 악천후나 모션 블러와 같은 극한 환경에서의 영상 인식 및 개선, 테스트 시점 적응 및 멀티태스크 학습, 4D 맵을 활용한 재구성과 같은 컴퓨터비전 분야의 핵심 주제들에 대한 논문들이다.
특히 연구팀은 지난해 CVPR 2024와 ECCV 2024에서도 각각 9편과 12편의 논문을 발표하여 학계의 주목을 받은 바 있는데, 이번 ICCV 2025에서의 성과를 통해 전 세계 컴퓨터 비전 분야의 선두 연구실로서 입지를 더욱 확고히 했다. 연구팀은 앞으로도 도전적인 연구를 이어가며 학문적·기술적 한계를 확장해 나갈 계획이다.
ICCV 2025는 오는 10월 19일부터 23일까지 미국 하와이 호놀룰루에서 개최될 예정이다.
2025.06.30 조회수 301 -
 가벼운 숨결·압력·소리까지 감지, 맞춤형 촉각 센서 개발
로봇이 물체를 잡을 때나, 의료기기가 몸의 맥박을 감지할 때 촉각 센서는 손끝처럼 ‘눌림’을 느끼는 기술이다. 기존 센서들은 반응이 느리거나 여러 번 쓰면 정확도가 떨어지는 단점이 있었는데, 한국 연구진이 가벼운 숨결, 압력, 소리까지 정확하고 빠르게 감지할 수 있어, 일상적인 움직임부터 의료용 진단까지 폭넓게 사용할 수 있는 센서를 개발하는데 성공했다.
우리 대학 기계공학과 박인규 교수 연구팀이 국가과학기술연구회(NST, 이사장 김영식) 산하 한국전자통신연구원(ETRI, 원장 방승찬)과의 공동연구를 통해 기존 촉각 센서 기술의 구조적 한계를 극복한 혁신적 기술을 개발했다고 23일 밝혔다.
이번 공동연구의 핵심은 ‘열성형 기반 3차원 전자 구조(Thermoformed 3D Electronics, T3DE)’를 적용해 유연성과 정밀성, 반복 내구성을 동시에 확보한 맞춤형 촉각 센서를 구현한 것이다.
특히, 소프트 엘라스토머(고무, 실리콘 등 쭉 늘렸다가 놓으면 다시 원래 모양으로 돌아오는 재료) 기반 센서가 갖는 느린 응답속도, 높은 히스테리시스*, 크립(오랫동안 힘을 가했을 때 재료가 천천히 변형되는 현상) 오차 등 구조적 문제를 극복하면서도 다양한 환경에서 정밀하게 작동하는 플랫폼으로 주목받고 있다.
* 히스테리시스(Hysteresis): 한 번 받았던 힘이나 변화가 기억처럼 남아서, 똑같은 자극을 주더라도 항상 같은 결과가 나오지 않는 현상
T3DE 센서는 2차원 필름 위에 정밀하게 전극을 형성한 후, 열과 압력을 가해 3차원 구조로 성형하는 과정을 통해 제작된다. 특히 센서 상부의 전극과 지지 다리 구조는 목적에 따라 기계적 물성을 조절할 수 있도록 설계되어 있으며, 지지 다리의 두께, 길이, 개수 등 미세한 구조 매개변수를 조정함으로써 센서의 영률(Young’s modulus)*을 10Pa에서 1MPa까지 폭넓게 설정할 수 있다. 이 수치는 피부, 근육, 힘줄 등의 생체조직과 유사한 수준으로, 실제 생체 인터페이스용 센서로도 유용하다.
* 영률(Young’s modulus): 재료의 강성을 나타내는 지표로, 이번 연구에서는 다양한 생체조직과 일치하는 수준까지 조절 가능함
이번에 개발된 T3DE 센서는 공기를 유전체로 활용해 전력 소비를 줄이는 동시에, 민감도, 응답속도, 온도 안정성, 반복 정밀도 측면에서도 우수한 성능을 보였다.
실험 결과, 해당 센서는 △민감도 5,884 kPa⁻¹ △응답속도 0.1ms(1,000분의 1초보다 짧은 시간) △히스테리시스 0.5% 이하 △5,000회 반복 측정에서도 정밀도 99.9% 이상을 유지하는 내구성을 입증했다.
연구팀은 이 센서를 활용해 고해상도 40×70 배열하여, 총 2,800개의 센서를 촘촘히 구성, 운동 중 발바닥의 압력 분포를 실시간 시각화하고, 손목 맥박 측정을 통한 혈관 건강 상태 평가 가능성도 확인했다. 또한, 상용 음향 센서 수준의 소리 감지 실험에서도 성공적인 결과를 얻었다. 즉, 이 센서는 발바닥 압력, 맥박, 소리까지 매우 정확하고 빠르게 측정할 수 있어서 운동, 건강, 소리 감지 등 다양한 분야에 활용될 수 있다.
T3DE 기술은 증강현실(AR) 기반 외과 수술 훈련 시스템에도 적용됐다. 각 센서 요소마다 서로 다른 영률을 부여해 실제 생체조직과 유사한 강성을 구현했으며, 수술 절개 시 가해지는 압력 강도에 따라 시각·촉각 피드백을 동시에 제공하고, 너무 깊이 베거나, 위험한 부위를 건드리면 실시간 위험 경고 기능까지 갖춘 시스템이 구현되었다. 이는 의료 교육의 몰입도와 정확성을 획기적으로 향상할 수 있는 기술로 평가된다.
우리 대학 박인규 교수는 “이 센서는 설계 단계에서부터 정밀하게 조절할 수 있어 다양한 환경에서도 안정적으로 작동한다”며, “일상생활은 물론 의료, 재활, 가상현실 등 다양한 분야에서 쓸 수 있을 것”이라고 밝혔다.
본 연구는 ETRI 최중락 박사, KAIST 한찬규 석사, 이돈호 박사과정이 공동 제1저자로 참여했으며, 박인규 교수가 전체 연구를 총괄했다. 연구 결과는 세계적 권위의 학술지 ‘사이언스 어드밴시스(Science Advances)’ 2025년 5월호에 게재됐으며, 해당 논문은 사이언스 어드밴시스 공식 SNS 채널(Facebook, Twitter)을 통해 전 세계에 소개되기도 했다.
※ 논문명: Thermoforming 2D films into 3D electronics for high-performance, customizable tactile sensing
※ DOI: 10.1126/sciadv.adv0057
이번 연구는 산업통상자원부, 한국연구재단, 한국산업기술평가관리원의 지원을 받아 수행됐다.
2025.06.23 조회수 765
가벼운 숨결·압력·소리까지 감지, 맞춤형 촉각 센서 개발
로봇이 물체를 잡을 때나, 의료기기가 몸의 맥박을 감지할 때 촉각 센서는 손끝처럼 ‘눌림’을 느끼는 기술이다. 기존 센서들은 반응이 느리거나 여러 번 쓰면 정확도가 떨어지는 단점이 있었는데, 한국 연구진이 가벼운 숨결, 압력, 소리까지 정확하고 빠르게 감지할 수 있어, 일상적인 움직임부터 의료용 진단까지 폭넓게 사용할 수 있는 센서를 개발하는데 성공했다.
우리 대학 기계공학과 박인규 교수 연구팀이 국가과학기술연구회(NST, 이사장 김영식) 산하 한국전자통신연구원(ETRI, 원장 방승찬)과의 공동연구를 통해 기존 촉각 센서 기술의 구조적 한계를 극복한 혁신적 기술을 개발했다고 23일 밝혔다.
이번 공동연구의 핵심은 ‘열성형 기반 3차원 전자 구조(Thermoformed 3D Electronics, T3DE)’를 적용해 유연성과 정밀성, 반복 내구성을 동시에 확보한 맞춤형 촉각 센서를 구현한 것이다.
특히, 소프트 엘라스토머(고무, 실리콘 등 쭉 늘렸다가 놓으면 다시 원래 모양으로 돌아오는 재료) 기반 센서가 갖는 느린 응답속도, 높은 히스테리시스*, 크립(오랫동안 힘을 가했을 때 재료가 천천히 변형되는 현상) 오차 등 구조적 문제를 극복하면서도 다양한 환경에서 정밀하게 작동하는 플랫폼으로 주목받고 있다.
* 히스테리시스(Hysteresis): 한 번 받았던 힘이나 변화가 기억처럼 남아서, 똑같은 자극을 주더라도 항상 같은 결과가 나오지 않는 현상
T3DE 센서는 2차원 필름 위에 정밀하게 전극을 형성한 후, 열과 압력을 가해 3차원 구조로 성형하는 과정을 통해 제작된다. 특히 센서 상부의 전극과 지지 다리 구조는 목적에 따라 기계적 물성을 조절할 수 있도록 설계되어 있으며, 지지 다리의 두께, 길이, 개수 등 미세한 구조 매개변수를 조정함으로써 센서의 영률(Young’s modulus)*을 10Pa에서 1MPa까지 폭넓게 설정할 수 있다. 이 수치는 피부, 근육, 힘줄 등의 생체조직과 유사한 수준으로, 실제 생체 인터페이스용 센서로도 유용하다.
* 영률(Young’s modulus): 재료의 강성을 나타내는 지표로, 이번 연구에서는 다양한 생체조직과 일치하는 수준까지 조절 가능함
이번에 개발된 T3DE 센서는 공기를 유전체로 활용해 전력 소비를 줄이는 동시에, 민감도, 응답속도, 온도 안정성, 반복 정밀도 측면에서도 우수한 성능을 보였다.
실험 결과, 해당 센서는 △민감도 5,884 kPa⁻¹ △응답속도 0.1ms(1,000분의 1초보다 짧은 시간) △히스테리시스 0.5% 이하 △5,000회 반복 측정에서도 정밀도 99.9% 이상을 유지하는 내구성을 입증했다.
연구팀은 이 센서를 활용해 고해상도 40×70 배열하여, 총 2,800개의 센서를 촘촘히 구성, 운동 중 발바닥의 압력 분포를 실시간 시각화하고, 손목 맥박 측정을 통한 혈관 건강 상태 평가 가능성도 확인했다. 또한, 상용 음향 센서 수준의 소리 감지 실험에서도 성공적인 결과를 얻었다. 즉, 이 센서는 발바닥 압력, 맥박, 소리까지 매우 정확하고 빠르게 측정할 수 있어서 운동, 건강, 소리 감지 등 다양한 분야에 활용될 수 있다.
T3DE 기술은 증강현실(AR) 기반 외과 수술 훈련 시스템에도 적용됐다. 각 센서 요소마다 서로 다른 영률을 부여해 실제 생체조직과 유사한 강성을 구현했으며, 수술 절개 시 가해지는 압력 강도에 따라 시각·촉각 피드백을 동시에 제공하고, 너무 깊이 베거나, 위험한 부위를 건드리면 실시간 위험 경고 기능까지 갖춘 시스템이 구현되었다. 이는 의료 교육의 몰입도와 정확성을 획기적으로 향상할 수 있는 기술로 평가된다.
우리 대학 박인규 교수는 “이 센서는 설계 단계에서부터 정밀하게 조절할 수 있어 다양한 환경에서도 안정적으로 작동한다”며, “일상생활은 물론 의료, 재활, 가상현실 등 다양한 분야에서 쓸 수 있을 것”이라고 밝혔다.
본 연구는 ETRI 최중락 박사, KAIST 한찬규 석사, 이돈호 박사과정이 공동 제1저자로 참여했으며, 박인규 교수가 전체 연구를 총괄했다. 연구 결과는 세계적 권위의 학술지 ‘사이언스 어드밴시스(Science Advances)’ 2025년 5월호에 게재됐으며, 해당 논문은 사이언스 어드밴시스 공식 SNS 채널(Facebook, Twitter)을 통해 전 세계에 소개되기도 했다.
※ 논문명: Thermoforming 2D films into 3D electronics for high-performance, customizable tactile sensing
※ DOI: 10.1126/sciadv.adv0057
이번 연구는 산업통상자원부, 한국연구재단, 한국산업기술평가관리원의 지원을 받아 수행됐다.
2025.06.23 조회수 765 -
 김승우 명예교수 삼성호암상 수상 기념 강연회 개최
우리 대학 2025년 삼성호암상 공학상 수상자인 김승우 명예교수의 업적을 기리기 위해, 6월 4일(수) KAIST 대전본원 기계공학동에서 ‘초정밀 측정 계측을 위한 초고속 포토닉스’를 주제로 '2025 김승우 명예교수 삼성호암상 수상기념 강연회'를 개최한다.
김승우 명예교수는 1초의 1000조분의 1의 ‘펨토초’가 매우 짧고 강한 빛의 펄스를 만들어내는 ‘레이저’를 활용한 ‘초정밀 광계측 기술’을 개발하여 길이, 위치, 결함, 움직임 등을 나노미터 수준(머리카락 굵기의 10만분의 1)까지 정밀하게 측정하여 측정산업 및 우주 항공 분야에 새로운 패러다임을 제시한 공로로 ‘2025 삼성호암상 공학상’을 수상했다.
이 기술은 반도체 및 디스플레이 생산 공정의 결함 제거, 인공위성 간 거리 측정 등 다양한 첨단 산업 분야에서 활용되고 있다.
이번 강연회에서는 김승우 명예교수의 연구 여정과 성과를 직접 들을 수 있는 자리가 마련되며, 참석자들과의 질의응답을 통해 차세대 광계측 기술의 발전 방향에 대한 통찰을 공유할 예정이다.
김승우 명예교수는 “펨토초 레이저 기술은 이제 산업과 우주 기술 분야에까지 활용되며, 사회에 기여하는 중요한 도구가 되었다. 이번 호암상 수상은 매우 영광이며, 그동안 함께 연구하며 저를 뒷받침해준 모든 동료들과 제자들, 그리고 KAIST에 드리는 상이라 생각한다. 이번 강연에서 연구 과정에서의 도전과 실패, 그리고 성과를 공유하며 앞으로의 새로운 도전에 대해서도 말씀드리고자 한다.”라고 말했다.
이광형 총장은 "김승우 명예교수님의 이번 수상은 KAIST가 추구해온 창의적 도전정신과 세계 수준의 연구 역량이 결실을 맺은 값진 성과이다. KAIST는 앞으로도 탁월한 연구자들이 자유롭게 도전하고, 과학기술을 통해 인류의 미래에 기여할 수 있도록 최선의 지원을 아끼지 않겠다.”라고 밝혔다.
삼성호암상은 삼성그룹 창업자인 고(故) 이병철 선대회장의 인간 존중과 사회 공헌 정신을 기리기 위해 1990년에 제정된 권위 있는 상으로, 과학·공학·의학·예술·사회봉사 등 5개 부문에 걸쳐 대한민국 발전과 인류 복지에 기여한 인물들에게 수여된다. ‘한국의 노벨상’으로 불릴 만큼 국내외에서 높은 평가를 받고 있다.
강연회는 KAIST 기계공학동 중앙회의동 대회의실에서 진행되며, 참석을 원할 경우 기계공학과(T. 042-350-3003, dan0819@kaist.ac.kr)에 문의하면 된다.
2025.06.04 조회수 1038
김승우 명예교수 삼성호암상 수상 기념 강연회 개최
우리 대학 2025년 삼성호암상 공학상 수상자인 김승우 명예교수의 업적을 기리기 위해, 6월 4일(수) KAIST 대전본원 기계공학동에서 ‘초정밀 측정 계측을 위한 초고속 포토닉스’를 주제로 '2025 김승우 명예교수 삼성호암상 수상기념 강연회'를 개최한다.
김승우 명예교수는 1초의 1000조분의 1의 ‘펨토초’가 매우 짧고 강한 빛의 펄스를 만들어내는 ‘레이저’를 활용한 ‘초정밀 광계측 기술’을 개발하여 길이, 위치, 결함, 움직임 등을 나노미터 수준(머리카락 굵기의 10만분의 1)까지 정밀하게 측정하여 측정산업 및 우주 항공 분야에 새로운 패러다임을 제시한 공로로 ‘2025 삼성호암상 공학상’을 수상했다.
이 기술은 반도체 및 디스플레이 생산 공정의 결함 제거, 인공위성 간 거리 측정 등 다양한 첨단 산업 분야에서 활용되고 있다.
이번 강연회에서는 김승우 명예교수의 연구 여정과 성과를 직접 들을 수 있는 자리가 마련되며, 참석자들과의 질의응답을 통해 차세대 광계측 기술의 발전 방향에 대한 통찰을 공유할 예정이다.
김승우 명예교수는 “펨토초 레이저 기술은 이제 산업과 우주 기술 분야에까지 활용되며, 사회에 기여하는 중요한 도구가 되었다. 이번 호암상 수상은 매우 영광이며, 그동안 함께 연구하며 저를 뒷받침해준 모든 동료들과 제자들, 그리고 KAIST에 드리는 상이라 생각한다. 이번 강연에서 연구 과정에서의 도전과 실패, 그리고 성과를 공유하며 앞으로의 새로운 도전에 대해서도 말씀드리고자 한다.”라고 말했다.
이광형 총장은 "김승우 명예교수님의 이번 수상은 KAIST가 추구해온 창의적 도전정신과 세계 수준의 연구 역량이 결실을 맺은 값진 성과이다. KAIST는 앞으로도 탁월한 연구자들이 자유롭게 도전하고, 과학기술을 통해 인류의 미래에 기여할 수 있도록 최선의 지원을 아끼지 않겠다.”라고 밝혔다.
삼성호암상은 삼성그룹 창업자인 고(故) 이병철 선대회장의 인간 존중과 사회 공헌 정신을 기리기 위해 1990년에 제정된 권위 있는 상으로, 과학·공학·의학·예술·사회봉사 등 5개 부문에 걸쳐 대한민국 발전과 인류 복지에 기여한 인물들에게 수여된다. ‘한국의 노벨상’으로 불릴 만큼 국내외에서 높은 평가를 받고 있다.
강연회는 KAIST 기계공학동 중앙회의동 대회의실에서 진행되며, 참석을 원할 경우 기계공학과(T. 042-350-3003, dan0819@kaist.ac.kr)에 문의하면 된다.
2025.06.04 조회수 1038 -
 ‘라이보’ 캣처럼 민첩하게 벽도 달린다..산악·험지 수색도 거뜬
우리 대학이 개발한 사족보행 로봇 ‘라이보(Raibo)’가 이제 계단, 틈, 벽, 잔해 등 불연속적이고 복잡한 지형에서도 고속으로 이동할 수 있게 됐다. 수직 벽을 달리고, 1.3m 폭의 간격을 뛰어넘으며, 징검다리 위를 시속 약 14.4Km로 질주하고, 30°경사·계단·징검다리가 혼합된 지형에서도 빠르고 민첩하게 움직이는 성능을 입증했다. 머지않아 라이보는 재난 현장 탐색이나 산악 수색 등 실질적인 임무 수행에 본격적으로 투입될 것으로 기대된다.
우리 대학 기계공학과 황보제민 교수 연구팀이 벽, 계단, 징검다리 등 불연속적이고 복잡한 지형에서도 시속 14.4km(4m/s)의 고속 보행이 가능한 사족 보행 로봇 내비게이션 프레임워크를 개발했다고 3일 밝혔다.
연구팀은 복잡하고 불연속적인 지형에서 로봇이 빠르고 안전하게 목표 지점까지 도달할 수 있도록 하는 사족 보행 내비게이션 시스템을 개발했다.
이를 위해 문제를 두 단계로 분해해 접근했는데, 첫째는 발 디딤 위치(foothold)를 계획하는 플래너(planner), 둘째는 계획된 발 디딤 위치를 정확히 따라가는 트래커(tracker)를 개발하는 것이다.
먼저, 플래너 모듈은 신경망 기반 휴리스틱을 활용한 샘플링 기반 최적화 방식을 통해 물리적으로 가능한 발 디딤 위치(foothold)를 빠르게 탐색하고, 시뮬레이션 롤아웃을 통해 최적 경로를 검증한다.
기존 방식들이 발 디딤 위치 외에도 접촉 시점, 로봇 자세 등의 다양한 요소를 함께 고려한 반면, 본 연구에서는 발 디딤 위치만을 탐색 공간으로 설정함으로써 계산 복잡도를 크게 낮췄다. 또한 고양이의 보행 방식에서 착안하여, 뒷발이 앞발이 밟았던 곳을 디디는 구조를 도입해 계산 복잡도를 다시 한번 크게 낮출 수 있었다.
두 번째, 트래커 모듈은 계획된 위치에 정확히 발을 디딜 수 있도록 학습되며, 트래킹 학습은 적절한 난이도의 환경에서 경쟁적으로 이루어진 생성 모델을 통해 진행된다.
트래커는 로봇이 계획된 위치에 정확하게 발을 디딜 수 있도록 강화학습을 통해 학습되며, 이 과정에서 ‘맵 생성기(map generator)’라는 생성 모델이 목표 분포를 제공한다.
이 생성 모델과 트래커는 동시에 경쟁적으로 학습돼, 트래커가 점진적으로 어려운 난이도에 적응할 수 있도록 설계됐다. 이후 학습된 트래커의 특성과 성능을 반영할 수 있도록, 트래커가 실행 가능한 디딤 위치 계획을 생성하는 샘플링 기반 플래너를 설계했다.
이 계층적 구조는 기존 기법 대비 계획 속도와 안정도 모두에서 우수한 성능을 보였으며, 실험을 통해 다양한 장애물과 불연속 지형에서의 고속 보행 능력과 처음 보는 지형에 대해서도 범용적으로 적용 가능함을 입증하였다.
황보제민 교수는 "기존에 상당히 큰 계산량을 요구하던 불연속 지형에서의 고속 네비게이션 문제를 오직 발자국의 위치를 어떻게 선정하는가의 간단한 관점으로 접근하였고, 고양이의 발디딤에서 착안하여 앞발이 디딘 곳을 뒷발이 딛도록 해 계산량을 획기적으로 줄일 수 있었다”며“보행 로봇이 극복할 수 있는 불연속 지형의 범위를 획기적으로 넓히고, 이를 고속으로 주행할 수 있도록 하여, 로봇이 재난현장 탐색이나 산악 수색 등 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다”고 말했다.
이번 연구 성과는 국제 학술지 사이언스 로보틱스(Science Robotics) 2025년 5월호에 게재됐다.
(논문명 : High- speed control and navigation for quadrupedal robots on complex and discrete terrain, https://www.science.org/doi/10.1126/scirobotics.ads6192)
유튜브링크 : https://youtu.be/EZbM594T3c4?si=kfxLF2XnVUvYVIyk https://youtu.be/EZbM594T3c4?si=jbp-IzHURIfWI8y2
2025.06.04 조회수 2238
‘라이보’ 캣처럼 민첩하게 벽도 달린다..산악·험지 수색도 거뜬
우리 대학이 개발한 사족보행 로봇 ‘라이보(Raibo)’가 이제 계단, 틈, 벽, 잔해 등 불연속적이고 복잡한 지형에서도 고속으로 이동할 수 있게 됐다. 수직 벽을 달리고, 1.3m 폭의 간격을 뛰어넘으며, 징검다리 위를 시속 약 14.4Km로 질주하고, 30°경사·계단·징검다리가 혼합된 지형에서도 빠르고 민첩하게 움직이는 성능을 입증했다. 머지않아 라이보는 재난 현장 탐색이나 산악 수색 등 실질적인 임무 수행에 본격적으로 투입될 것으로 기대된다.
우리 대학 기계공학과 황보제민 교수 연구팀이 벽, 계단, 징검다리 등 불연속적이고 복잡한 지형에서도 시속 14.4km(4m/s)의 고속 보행이 가능한 사족 보행 로봇 내비게이션 프레임워크를 개발했다고 3일 밝혔다.
연구팀은 복잡하고 불연속적인 지형에서 로봇이 빠르고 안전하게 목표 지점까지 도달할 수 있도록 하는 사족 보행 내비게이션 시스템을 개발했다.
이를 위해 문제를 두 단계로 분해해 접근했는데, 첫째는 발 디딤 위치(foothold)를 계획하는 플래너(planner), 둘째는 계획된 발 디딤 위치를 정확히 따라가는 트래커(tracker)를 개발하는 것이다.
먼저, 플래너 모듈은 신경망 기반 휴리스틱을 활용한 샘플링 기반 최적화 방식을 통해 물리적으로 가능한 발 디딤 위치(foothold)를 빠르게 탐색하고, 시뮬레이션 롤아웃을 통해 최적 경로를 검증한다.
기존 방식들이 발 디딤 위치 외에도 접촉 시점, 로봇 자세 등의 다양한 요소를 함께 고려한 반면, 본 연구에서는 발 디딤 위치만을 탐색 공간으로 설정함으로써 계산 복잡도를 크게 낮췄다. 또한 고양이의 보행 방식에서 착안하여, 뒷발이 앞발이 밟았던 곳을 디디는 구조를 도입해 계산 복잡도를 다시 한번 크게 낮출 수 있었다.
두 번째, 트래커 모듈은 계획된 위치에 정확히 발을 디딜 수 있도록 학습되며, 트래킹 학습은 적절한 난이도의 환경에서 경쟁적으로 이루어진 생성 모델을 통해 진행된다.
트래커는 로봇이 계획된 위치에 정확하게 발을 디딜 수 있도록 강화학습을 통해 학습되며, 이 과정에서 ‘맵 생성기(map generator)’라는 생성 모델이 목표 분포를 제공한다.
이 생성 모델과 트래커는 동시에 경쟁적으로 학습돼, 트래커가 점진적으로 어려운 난이도에 적응할 수 있도록 설계됐다. 이후 학습된 트래커의 특성과 성능을 반영할 수 있도록, 트래커가 실행 가능한 디딤 위치 계획을 생성하는 샘플링 기반 플래너를 설계했다.
이 계층적 구조는 기존 기법 대비 계획 속도와 안정도 모두에서 우수한 성능을 보였으며, 실험을 통해 다양한 장애물과 불연속 지형에서의 고속 보행 능력과 처음 보는 지형에 대해서도 범용적으로 적용 가능함을 입증하였다.
황보제민 교수는 "기존에 상당히 큰 계산량을 요구하던 불연속 지형에서의 고속 네비게이션 문제를 오직 발자국의 위치를 어떻게 선정하는가의 간단한 관점으로 접근하였고, 고양이의 발디딤에서 착안하여 앞발이 디딘 곳을 뒷발이 딛도록 해 계산량을 획기적으로 줄일 수 있었다”며“보행 로봇이 극복할 수 있는 불연속 지형의 범위를 획기적으로 넓히고, 이를 고속으로 주행할 수 있도록 하여, 로봇이 재난현장 탐색이나 산악 수색 등 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다”고 말했다.
이번 연구 성과는 국제 학술지 사이언스 로보틱스(Science Robotics) 2025년 5월호에 게재됐다.
(논문명 : High- speed control and navigation for quadrupedal robots on complex and discrete terrain, https://www.science.org/doi/10.1126/scirobotics.ads6192)
유튜브링크 : https://youtu.be/EZbM594T3c4?si=kfxLF2XnVUvYVIyk https://youtu.be/EZbM594T3c4?si=jbp-IzHURIfWI8y2
2025.06.04 조회수 2238 -
 기계공학과 김성용 교수, UNOC3에 북태평양해양과학기구 대표로 참석
우리 대학 기계공학과 김성용 교수가 지난 6월 9일부터 13일까지 프랑스 니스에서 열리는 제 3차 국제연합 해양 컨퍼런스(United Nations Ocean Conference; 이하 UNOC3)에 북태평양해양과학기구(North Pacific Marine Science Organization; 이하 PICES)의 대표로 참석했다.
UNOC3는 3년 주기의 국제연합의 지속가능한발전목표(Sustainable Development Goals; SDGs) 구체화하는 회의로, 올해 회의에서는 전 세계 140여 개국 정상, 정부 및 비정부기구 관계자들이 해양과 관련된 기초연구, 응용기술, 인력양성, 과학정책, 마이크로 플라스틱을 포함한 오염, 수산 관리, 해운업, 기후 및 생물다양성, 공해역 해양 환경 및 생물다양성 보호 조약(Biodiversity Beyond National Jurisdiction; BBNJ), 빈곤 퇴출 및 식량안보를 위한 지속가능한 식량자원 확보, 자원보호를 위한 국제법 및 Blue Economy등에 관한 10가지 해양 행동 패널(Ocean Action Panel)을 구성하여 논의하였다.
이번 회의의 개회식에서는 프랑스 마크롱 대통령과 코스타리카 로블레스 대통령이 공동회의 의장으로 선출되었고, 향후 3년간 본 회의에서 논의된 해양컨퍼런스의 주제를 제4차 UNOC회의로 연계할 수 있도록 국가간의 협력과 과학자, 일반인, 이해관계자들의 공동 노력을 견인할 예정이다. 차기 제4차 UNOC는 2028년 칠레와 한국이 주최할 예정이다. 또한, 김성용 교수는 UNOC3의 연계행사로 6월 3일부터 6일까지 동일한 장소에서 개최된 One Ocean Science Congress 2025에 해양디지털트윈 세션의 공동좌장으로 참석하였다. 참고로 김성용 교수는 2019년 PICES의 해양관측 위원회 의장으로, 2024년 전 세계 해양디지털트윈 운영위원회 위원으로 선출돼 활동중이다.
김성용 교수는 "연구를 수행하고 직업을 찾는 다양한 동기와 목표가 있겠지만 지속가능발전목표와 연계해 본다면 더 의미있는 동기와 목표를 찾을 수 있으리라 생각한다. 다양한 국가가 서로 공유하는 환경인 해양에 대한 국가간의 협력과 시민과학자(citizen scientists) 및 전문과학자(professional scientists)의 공동의 목적을 위한 협력과 행동계획이 구체화 되길 소망한다"라고 소감을 전했다.
본 위원회 활동은 한국연구재단 중견연구자 지원과제, 해양경찰청/해양수산과학기술진흥원의 AI 기반 해양 수색구조 의사결정 지원 시스템 연구과제 및 해양수산부의 지원을 받았다.
2025.06.01 조회수 439
기계공학과 김성용 교수, UNOC3에 북태평양해양과학기구 대표로 참석
우리 대학 기계공학과 김성용 교수가 지난 6월 9일부터 13일까지 프랑스 니스에서 열리는 제 3차 국제연합 해양 컨퍼런스(United Nations Ocean Conference; 이하 UNOC3)에 북태평양해양과학기구(North Pacific Marine Science Organization; 이하 PICES)의 대표로 참석했다.
UNOC3는 3년 주기의 국제연합의 지속가능한발전목표(Sustainable Development Goals; SDGs) 구체화하는 회의로, 올해 회의에서는 전 세계 140여 개국 정상, 정부 및 비정부기구 관계자들이 해양과 관련된 기초연구, 응용기술, 인력양성, 과학정책, 마이크로 플라스틱을 포함한 오염, 수산 관리, 해운업, 기후 및 생물다양성, 공해역 해양 환경 및 생물다양성 보호 조약(Biodiversity Beyond National Jurisdiction; BBNJ), 빈곤 퇴출 및 식량안보를 위한 지속가능한 식량자원 확보, 자원보호를 위한 국제법 및 Blue Economy등에 관한 10가지 해양 행동 패널(Ocean Action Panel)을 구성하여 논의하였다.
이번 회의의 개회식에서는 프랑스 마크롱 대통령과 코스타리카 로블레스 대통령이 공동회의 의장으로 선출되었고, 향후 3년간 본 회의에서 논의된 해양컨퍼런스의 주제를 제4차 UNOC회의로 연계할 수 있도록 국가간의 협력과 과학자, 일반인, 이해관계자들의 공동 노력을 견인할 예정이다. 차기 제4차 UNOC는 2028년 칠레와 한국이 주최할 예정이다. 또한, 김성용 교수는 UNOC3의 연계행사로 6월 3일부터 6일까지 동일한 장소에서 개최된 One Ocean Science Congress 2025에 해양디지털트윈 세션의 공동좌장으로 참석하였다. 참고로 김성용 교수는 2019년 PICES의 해양관측 위원회 의장으로, 2024년 전 세계 해양디지털트윈 운영위원회 위원으로 선출돼 활동중이다.
김성용 교수는 "연구를 수행하고 직업을 찾는 다양한 동기와 목표가 있겠지만 지속가능발전목표와 연계해 본다면 더 의미있는 동기와 목표를 찾을 수 있으리라 생각한다. 다양한 국가가 서로 공유하는 환경인 해양에 대한 국가간의 협력과 시민과학자(citizen scientists) 및 전문과학자(professional scientists)의 공동의 목적을 위한 협력과 행동계획이 구체화 되길 소망한다"라고 소감을 전했다.
본 위원회 활동은 한국연구재단 중견연구자 지원과제, 해양경찰청/해양수산과학기술진흥원의 AI 기반 해양 수색구조 의사결정 지원 시스템 연구과제 및 해양수산부의 지원을 받았다.
2025.06.01 조회수 439 -
 기계공학과 김성용 교수, 기상기술심의위원회 회장으로 선출
우리 대학 기계공학과 김성용 교수가 기상청 기상기술심의위원회 회장에 선출됐다. 김성용 교수는 대기-해양 상호작용 연구를 수행하며 해양 관측 분야의 전문가로 기상관련 분야 국가기술표준(Korean Industrial Standars, 이하 KS)의 제정, 개정, 폐지 및 적부확인에 대한 조사 및 심의를 수행하고 이를 종합하여 최종결정하는 역할을 수행할 예정이다.(임기:2년, 2025.05.01.~).
또한, 김 교수는 타 산업분야와 기상분야 표준간 중복성 검토 및 표준업무의 범위를 확대하기 위해 국가표준 관련 최고회의인 산업표준심의회의 위원(1분과 International Organization for Standardization(ISO) 분야 표준 심의)으로 활동할 예정이다. (임기:3년, 2025.05.01.~)
산업표준심의회는 적정하고 합리적인 KS를 제정, 보급하여 제품 및 서비스의 품질, 생산효율, 생산기술을 향상시키고 거래를 단순화, 공정화하며 소비를 합리화함으로써 산업경쟁력 제고 및 국가경제를 발전시키는데 기여하고 있는 위원회다. 우리나라 국제표준화 활동의 지속적인 리더십 확보와 국가표준과 국제표준의 정책 일관성 확보를 위하여 현재 국제표준화기구(ISO)이사회 및 정책위원 등으로 활동하시는 분들을 산업표준심의회 최고 의결 조직인 표준회의 분과위원회 위원으로 위촉해오고 있다.
김성용 교수는 2019년부터 북태평양 해양과학기구(PICES) 관측 커미티 의장으로 활동하며 해양 관측 설계, 연안 관측 프로그램, 대기-해양 관측 센서에 관한 전문가로서 그 전문성을 인정받아 기상 기술 심의위원으로 선출됐다.
김 교수는 "대기-해양 상호작용에 관한 관측 경험을 바탕으로 기상분야의 기술표준화에 기여할 수 있게되어 대기과학 커뮤니티를 도울 수 있어 감사하고, 국가 표준에 관한 산업표준심의회에 참여할 수 있어 과학 뿐만 아니라 산업계에 기여할 수 있을 예정으로 기대가 크다ˮ고 소감을 전했다.
본 위원회 활동은 한국연구재단 중견연구자 지원과제, 해양경찰청/해양수산과학기술진흥원의 AI 기반 해양 수색구조 의사결정 지원 시스템 연구과제 및 해양수산부의 지원을 받을 예정이다.
2025.05.14 조회수 1060
기계공학과 김성용 교수, 기상기술심의위원회 회장으로 선출
우리 대학 기계공학과 김성용 교수가 기상청 기상기술심의위원회 회장에 선출됐다. 김성용 교수는 대기-해양 상호작용 연구를 수행하며 해양 관측 분야의 전문가로 기상관련 분야 국가기술표준(Korean Industrial Standars, 이하 KS)의 제정, 개정, 폐지 및 적부확인에 대한 조사 및 심의를 수행하고 이를 종합하여 최종결정하는 역할을 수행할 예정이다.(임기:2년, 2025.05.01.~).
또한, 김 교수는 타 산업분야와 기상분야 표준간 중복성 검토 및 표준업무의 범위를 확대하기 위해 국가표준 관련 최고회의인 산업표준심의회의 위원(1분과 International Organization for Standardization(ISO) 분야 표준 심의)으로 활동할 예정이다. (임기:3년, 2025.05.01.~)
산업표준심의회는 적정하고 합리적인 KS를 제정, 보급하여 제품 및 서비스의 품질, 생산효율, 생산기술을 향상시키고 거래를 단순화, 공정화하며 소비를 합리화함으로써 산업경쟁력 제고 및 국가경제를 발전시키는데 기여하고 있는 위원회다. 우리나라 국제표준화 활동의 지속적인 리더십 확보와 국가표준과 국제표준의 정책 일관성 확보를 위하여 현재 국제표준화기구(ISO)이사회 및 정책위원 등으로 활동하시는 분들을 산업표준심의회 최고 의결 조직인 표준회의 분과위원회 위원으로 위촉해오고 있다.
김성용 교수는 2019년부터 북태평양 해양과학기구(PICES) 관측 커미티 의장으로 활동하며 해양 관측 설계, 연안 관측 프로그램, 대기-해양 관측 센서에 관한 전문가로서 그 전문성을 인정받아 기상 기술 심의위원으로 선출됐다.
김 교수는 "대기-해양 상호작용에 관한 관측 경험을 바탕으로 기상분야의 기술표준화에 기여할 수 있게되어 대기과학 커뮤니티를 도울 수 있어 감사하고, 국가 표준에 관한 산업표준심의회에 참여할 수 있어 과학 뿐만 아니라 산업계에 기여할 수 있을 예정으로 기대가 크다ˮ고 소감을 전했다.
본 위원회 활동은 한국연구재단 중견연구자 지원과제, 해양경찰청/해양수산과학기술진흥원의 AI 기반 해양 수색구조 의사결정 지원 시스템 연구과제 및 해양수산부의 지원을 받을 예정이다.
2025.05.14 조회수 1060 -
 KAIST-고려대, 심혈관 진단 정밀도 높이는 영상기술 개발 및 임상 성공
우리 대학 기계공학과 유홍기 교수팀이 고려대학교 구로병원 심혈관센터 김진원 교수팀과 협력해, 관상동맥 질환의 진단 정밀도를 혁신적으로 높일 수 있는 영상기술을 개발하고, 이를 세계 최초로 사람을 대상으로 한 임상시험에 성공했다.
이번 연구에서는 광간섭단층촬영(OCT)과 형광수명영상(FLIm)을 결합한 차세대 다중 모달 영상 기술을 실제 환자에게 적용해, 심장 혈관 속 동맥경화반*의 구조뿐만 아니라 그 내부의 생화학적 조성까지 실시간으로 정밀하게 파악할 수 있음을 입증했다.
*동맥경화반: 콜레스테롤과 염증 세포 등이 동맥 벽에 쌓여 혈관이 좁아지게 만드는 병변.
기존 영상기술로는 경화반 내부의 복잡한 병변을 정확히 구분하거나 정량화하기 어려웠지만, OCT-FLIm 기술을 통해 염증, 치유반(손상 회복 흔적), 칼슘 침착 등 다양한 병리 정보를 정밀하게 구분할 수 있다. 특히, FLIm의 형광 수명 정보를 활용함으로써, 이러한 생화학적 특성이 환자의 임상 상태와 밀접하게 연관되어 있음을 확인했다.
연구진은 급성 심근경색과 같은 급성 관상동맥 증후군 환자에서는 염증 지표가 높게 나타났으며, 급속히 진행되는 병변에서는 반복된 경화반 파열과 치유로 인해 치유반이 높은 빈도로 뚜렷하게 분포하는 특징을 발견했다. 이는 심혈관 질환의 진행 정도나 개별 경화반의 상태를 보다 정밀하게 파악할 수 있는 단서를 제공한다.
이번 임상에서는 OCT와 FLIm을 완전히 통합한 융합 영상 카테터(Catheter)가 사용되었다. 연구진은 국내 환자 40명을 대상으로 실제 혈관 재개통 시술 중 해당 카테터를 삽입하여 병변을 분석했고, 모든 환자에서 시술이 안전하게 완료되었다. 이는 세계 최초로 융합 영상 카테터를 임상에 성공적으로 적용한 사례다.
*영상카테터: 관상동맥 내부에 삽입되어, 끝단에 부착된 렌즈를 통해 영상을 촬영하는 가느다란 관 모양의 의료기기
동맥경화반의 병태생리는 매우 복잡하며, 단순한 해부학적 정보만으로는 향후 심혈관 질환 발생 여부나 치료 예후를 예측하기 어렵다는 사실이 여러 연구를 통해 밝혀지고 있다. 이번 연구는 실제 환자의 혈관에서 병리학적 위험 요소를 실시간으로 시각화하고 정량화한 세계 최초로 임상 사례로, 심혈관 질환의 정밀 진단과 개인 맞춤형 치료 전략 개발에 있어 중요한 전환점이 될 것으로 기대된다.
유홍기 교수가 공동 교신저자, 남형수 연구교수가 공동 제1 저자로 참여한 이번 연구 결과는 심장학 분야 최고 권위 학술지인 미국의학회 심장학 저널, 자마 카디오로지(JAMA Cardiology, Journal of the American Medical Association)에 2025년 5월 7일 자로 게재되었다.
※ 논문명: Intracoronary Structural-Molecular Imaging for Multitargeted Characterization of High-Risk Plaque
DOI: 10.1001/jamacardio.2025.0928
이번 연구는 삼성미래기술육성사업 및 범부처전주기의료기기연구개발사업의 지원으로 수행되었다.
2025.05.08 조회수 1892
KAIST-고려대, 심혈관 진단 정밀도 높이는 영상기술 개발 및 임상 성공
우리 대학 기계공학과 유홍기 교수팀이 고려대학교 구로병원 심혈관센터 김진원 교수팀과 협력해, 관상동맥 질환의 진단 정밀도를 혁신적으로 높일 수 있는 영상기술을 개발하고, 이를 세계 최초로 사람을 대상으로 한 임상시험에 성공했다.
이번 연구에서는 광간섭단층촬영(OCT)과 형광수명영상(FLIm)을 결합한 차세대 다중 모달 영상 기술을 실제 환자에게 적용해, 심장 혈관 속 동맥경화반*의 구조뿐만 아니라 그 내부의 생화학적 조성까지 실시간으로 정밀하게 파악할 수 있음을 입증했다.
*동맥경화반: 콜레스테롤과 염증 세포 등이 동맥 벽에 쌓여 혈관이 좁아지게 만드는 병변.
기존 영상기술로는 경화반 내부의 복잡한 병변을 정확히 구분하거나 정량화하기 어려웠지만, OCT-FLIm 기술을 통해 염증, 치유반(손상 회복 흔적), 칼슘 침착 등 다양한 병리 정보를 정밀하게 구분할 수 있다. 특히, FLIm의 형광 수명 정보를 활용함으로써, 이러한 생화학적 특성이 환자의 임상 상태와 밀접하게 연관되어 있음을 확인했다.
연구진은 급성 심근경색과 같은 급성 관상동맥 증후군 환자에서는 염증 지표가 높게 나타났으며, 급속히 진행되는 병변에서는 반복된 경화반 파열과 치유로 인해 치유반이 높은 빈도로 뚜렷하게 분포하는 특징을 발견했다. 이는 심혈관 질환의 진행 정도나 개별 경화반의 상태를 보다 정밀하게 파악할 수 있는 단서를 제공한다.
이번 임상에서는 OCT와 FLIm을 완전히 통합한 융합 영상 카테터(Catheter)가 사용되었다. 연구진은 국내 환자 40명을 대상으로 실제 혈관 재개통 시술 중 해당 카테터를 삽입하여 병변을 분석했고, 모든 환자에서 시술이 안전하게 완료되었다. 이는 세계 최초로 융합 영상 카테터를 임상에 성공적으로 적용한 사례다.
*영상카테터: 관상동맥 내부에 삽입되어, 끝단에 부착된 렌즈를 통해 영상을 촬영하는 가느다란 관 모양의 의료기기
동맥경화반의 병태생리는 매우 복잡하며, 단순한 해부학적 정보만으로는 향후 심혈관 질환 발생 여부나 치료 예후를 예측하기 어렵다는 사실이 여러 연구를 통해 밝혀지고 있다. 이번 연구는 실제 환자의 혈관에서 병리학적 위험 요소를 실시간으로 시각화하고 정량화한 세계 최초로 임상 사례로, 심혈관 질환의 정밀 진단과 개인 맞춤형 치료 전략 개발에 있어 중요한 전환점이 될 것으로 기대된다.
유홍기 교수가 공동 교신저자, 남형수 연구교수가 공동 제1 저자로 참여한 이번 연구 결과는 심장학 분야 최고 권위 학술지인 미국의학회 심장학 저널, 자마 카디오로지(JAMA Cardiology, Journal of the American Medical Association)에 2025년 5월 7일 자로 게재되었다.
※ 논문명: Intracoronary Structural-Molecular Imaging for Multitargeted Characterization of High-Risk Plaque
DOI: 10.1001/jamacardio.2025.0928
이번 연구는 삼성미래기술육성사업 및 범부처전주기의료기기연구개발사업의 지원으로 수행되었다.
2025.05.08 조회수 1892 -
 ‘구멍 개수가 자연수가 아닌 도넛’과 같은 ‘비양자화된 Zak 위상을 갖는 메타물질’ 개발
수학에서는 도형을 분류할 때 구멍(genus)의 개수를 기준으로 삼기도 한다. 예를 들어, 구멍이 하나 있는 도넛(torus)은 구멍이 없는 구(sphere)와는 구분되지만, 머그컵과는 같은 부류에 속한다. 구멍의 개수처럼 도형을 구부리거나 늘이는 연속적인 변형에도 변하지 않는 성질을 위상적 성질이라 하며, 위상수학에서는 이러한 성질을 기준으로 도형을 구분한다.
이와 유사하게, 음향 양자 결정(phononic crystal)도 파동 특성이 갖는 위상적 성질에 따라 분류가 가능하다. 예를 들어, 1차원 음향 양자 결정은 Zak 위상이 0인 구조와 π인 구조로 구분할 수 있다.
우리 대학 기계공학과 전원주 교수 연구팀이 메타물질의 파동적 특성 관점에서 “도넛 구멍의 개수가 꼭 자연수여야만 할까?"라는 질문을 바탕으로, 위상적 성질이 0이나 π로 양자화된 기존 분류 체계를 넘어, 0과 π 사이의 비양자화된 성질을 갖는 메타물질을 개발하였다.
이러한 비양자화된 위상적 성질의 도입은, 그동안 학계의 난제로 꼽히던 파장 대비 매우 작은 크기의 음향 양자 결정으로 파동 에너지를 제어하는 문제를 해결하는 데 중요한 실마리가 되었다.
더 나아가, 비양자화된 Zak 위상을 원하는 값으로 자유자재로 조정함으로써, 메타물질 내 집속되는 파동의 주파수를 조절할 수 있다. 이를 통해 목표 주파수의 파동을 제어하거나, rainbow trapping과 같이 파동 에너지를 주파수별로 원하는 위치에 집속할 수 있게 되었다 (그림 1(b) 참고). 전원주 교수 연구팀은 연구실 핵심 기술 중 하나인 ‘음향 블랙홀 기반의 포노닉 빔 설계 기술’을 위상 절연체(topologial insulator) 분야에 활용하여 연구 성과를 이끌어냈다.
전원주 교수는 “양자화된 Zak 위상 개념 위주로 연구되던 기존 메타물질 설계 방식을 넘어, 비양자화된 Zak 위상을 갖는 구조를 개발함으로써 주파수와 집속 위치 관점에서 파동에너지를 정밀하게 제어할 수 있게 되었다”며, “이번 연구에서 제시한 비양자화된 Zak 위상을 활용한 새로운 개념의 파동 집속 기술은 향후 초미세 진동 감지 센서, 고효율 에너지 하베스팅 장치 등 파동 집속이 필요한 다양한 공학적 응용으로 이어질 수 있을 것”이라고 말했다.
이번 연구는 박성민 박사과정(현, KAIST 기계기술연구소 연수연구원)이 제1저자로 참여했으며, 기계공학 분야 국제 학술지인 Mechanical Systems and Signal Processing (JCI 기준 상위 2.5%(5/183))에 4월 1일 게재되었다.
※ 논문명: Phononic crystals with non-quantized Zak phases for controlling interface state frequencies
한편, 본 연구는 한국연구재단 중견연구자지원사업의 지원을 받아 수행되었다.
2025.04.14 조회수 2558
‘구멍 개수가 자연수가 아닌 도넛’과 같은 ‘비양자화된 Zak 위상을 갖는 메타물질’ 개발
수학에서는 도형을 분류할 때 구멍(genus)의 개수를 기준으로 삼기도 한다. 예를 들어, 구멍이 하나 있는 도넛(torus)은 구멍이 없는 구(sphere)와는 구분되지만, 머그컵과는 같은 부류에 속한다. 구멍의 개수처럼 도형을 구부리거나 늘이는 연속적인 변형에도 변하지 않는 성질을 위상적 성질이라 하며, 위상수학에서는 이러한 성질을 기준으로 도형을 구분한다.
이와 유사하게, 음향 양자 결정(phononic crystal)도 파동 특성이 갖는 위상적 성질에 따라 분류가 가능하다. 예를 들어, 1차원 음향 양자 결정은 Zak 위상이 0인 구조와 π인 구조로 구분할 수 있다.
우리 대학 기계공학과 전원주 교수 연구팀이 메타물질의 파동적 특성 관점에서 “도넛 구멍의 개수가 꼭 자연수여야만 할까?"라는 질문을 바탕으로, 위상적 성질이 0이나 π로 양자화된 기존 분류 체계를 넘어, 0과 π 사이의 비양자화된 성질을 갖는 메타물질을 개발하였다.
이러한 비양자화된 위상적 성질의 도입은, 그동안 학계의 난제로 꼽히던 파장 대비 매우 작은 크기의 음향 양자 결정으로 파동 에너지를 제어하는 문제를 해결하는 데 중요한 실마리가 되었다.
더 나아가, 비양자화된 Zak 위상을 원하는 값으로 자유자재로 조정함으로써, 메타물질 내 집속되는 파동의 주파수를 조절할 수 있다. 이를 통해 목표 주파수의 파동을 제어하거나, rainbow trapping과 같이 파동 에너지를 주파수별로 원하는 위치에 집속할 수 있게 되었다 (그림 1(b) 참고). 전원주 교수 연구팀은 연구실 핵심 기술 중 하나인 ‘음향 블랙홀 기반의 포노닉 빔 설계 기술’을 위상 절연체(topologial insulator) 분야에 활용하여 연구 성과를 이끌어냈다.
전원주 교수는 “양자화된 Zak 위상 개념 위주로 연구되던 기존 메타물질 설계 방식을 넘어, 비양자화된 Zak 위상을 갖는 구조를 개발함으로써 주파수와 집속 위치 관점에서 파동에너지를 정밀하게 제어할 수 있게 되었다”며, “이번 연구에서 제시한 비양자화된 Zak 위상을 활용한 새로운 개념의 파동 집속 기술은 향후 초미세 진동 감지 센서, 고효율 에너지 하베스팅 장치 등 파동 집속이 필요한 다양한 공학적 응용으로 이어질 수 있을 것”이라고 말했다.
이번 연구는 박성민 박사과정(현, KAIST 기계기술연구소 연수연구원)이 제1저자로 참여했으며, 기계공학 분야 국제 학술지인 Mechanical Systems and Signal Processing (JCI 기준 상위 2.5%(5/183))에 4월 1일 게재되었다.
※ 논문명: Phononic crystals with non-quantized Zak phases for controlling interface state frequencies
한편, 본 연구는 한국연구재단 중견연구자지원사업의 지원을 받아 수행되었다.
2025.04.14 조회수 2558 -
 갤럭시코퍼레이션과 ‘AI 엔터테크 연구센터’ 현판식 개최
우리 대학은 인공지능(AI) 엔터테크 기업 갤럭시코퍼레이션(대표 최용호)과 함께 ‘AI 엔터테크 연구센터’ 설립을 위한 현판식을 KAIST 본원에서 개최한다.
이번 협력은 KAIST가 추진해 온 예술 융합 연구 전략의 일환으로, 과학기술을 기반으로 한 창의적 문화 콘텐츠 개발을 통해 미래형 K-Culture를 주도하려는 노력의 연장선에 있다. KAIST는 단순한 기술 개발을 넘어, 감성 기술과 문화적 상상력의 융합을 통해 콘텐츠 산업의 지평을 넓히는 ‘테크-아트(Tech-Art)’ 융합 모델을 지속적으로 실현해 오고 있다.
앞서 KAIST는 세계적인 소프라노 조수미 초빙석학교수와의 협력으로 ‘조수미 아트&테크 연구센터’를 설립하고, AI 기반의 인터랙티브 공연 기술, 몰입형 콘텐츠 등 예술과 공학의 융합 연구를 선도해왔다. 이번 ‘AI 엔터테크 연구센터’ 설립은 K-콘텐츠 산업의 기술적 확장을 위한 새로운 도전으로 평가받고 있다.
또한, 갤럭시코퍼레이션 소속 아티스트이자 KAIST 기계공학과 초빙교수로 활동 중인 가수 지드래곤(본명 권지용)의 역할도 큰 계기가 됐다. 권 교수는 작년 KAIST에 임명된 이후, 엔터테인먼트와 첨단기술을 융합하는 ‘AI 엔터테크’ 분야의 발전을 위해 소속사를 통해 KAIST 연구과제를 공모하고 연구센터 설립을 적극 추진해 왔다.
AI 엔터테크 연구센터는 올해 3분기 정식 출범을 앞두고 있으며, 이번 현판식은 권지용 교수의 KAIST 방문 일정에 맞춰 진행됐다. 갤럭시코퍼레이션은 최근 마이크로소프트(MS) 나델라 CEO와 유일하게 엔터테크 기업 자격으로 비공개 간담회를 가지며, AI 엔터테크의 글로벌화를 본격 추진하고 있다. 또한 지난해부터 KAIST와 협력 관계를 구축, 연구센터 설립을 통해 시공간을 초월하는 엔터와 테크의 융합을 적극적으로 모색한다는 방침이다.
권지용 교수는 이날 오후 KAIST 류근철 스포츠컴플렉스에서 열리는 KAIST와 헤럴드미디어그룹, 국가과학기술연구회가 공동 주최하는 ‘이노베이트 코리아 2025’ 행사에 참석해, ‘AI 엔터테크의 미래’를 주제로 스페셜 토크에 나선다. 이번 토크쇼에는 권 교수 외에도 KAIST 기계공학과 이승섭 교수, 경희대학교 김상균 교수, 갤럭시코퍼레이션 최용호 대표가 함께 참여한다.
양 기관은 지난해 K-팝 글로벌 확산을 위한 과학기술 공동연구를 골자로 MOU를 체결한 바 있으며, 이번 연구센터 설립은 그 실질적인 첫 결실이다. 연구센터가 본격적으로 가동되면, AI 기반 엔터테크 플랫폼 개발, 글로벌 콘텐츠 기술 공동연구 등 다양한 프로젝트가 추진될 예정이다.
최용호 갤럭시코퍼레이션 CHO(Chief Happiness Officer)는 “이번 협력은 KAIST AI 및 최첨단 기술을 팬덤 플랫폼에 접목시켜 전 세계 팬들에게 완전히 새로운 엔터테인먼트 경험을 제공하는 출발점”이라며 “AI 엔터테크의 융합은 단순한 기술적 진보를 넘어 인류의 삶을 더욱 풍요롭게 변화시키는 혁신의 원동력”이라고 전했다.
이광형 총장은 “KAIST의 과학기술 역량이 권지용 교수의 글로벌 감각과 결합해, K-컬처의 기술적 진화를 이끌 것이라 확신한다”며, “KAIST의 도전정신과 연구 DNA가 엔터테크 시장에 새로운 물결을 일으키길 기대한다”고 밝혔다.
한편, 지드래곤 권지용 교수의 소속사인 갤럭시코퍼레이션은 IP, 미디어, 테크, 엔터테인먼트 융합 기술을 기반으로 새로운 패러다임을 제시하고 있는 AI 엔터테크 기업이다.
2025.04.09 조회수 2156
갤럭시코퍼레이션과 ‘AI 엔터테크 연구센터’ 현판식 개최
우리 대학은 인공지능(AI) 엔터테크 기업 갤럭시코퍼레이션(대표 최용호)과 함께 ‘AI 엔터테크 연구센터’ 설립을 위한 현판식을 KAIST 본원에서 개최한다.
이번 협력은 KAIST가 추진해 온 예술 융합 연구 전략의 일환으로, 과학기술을 기반으로 한 창의적 문화 콘텐츠 개발을 통해 미래형 K-Culture를 주도하려는 노력의 연장선에 있다. KAIST는 단순한 기술 개발을 넘어, 감성 기술과 문화적 상상력의 융합을 통해 콘텐츠 산업의 지평을 넓히는 ‘테크-아트(Tech-Art)’ 융합 모델을 지속적으로 실현해 오고 있다.
앞서 KAIST는 세계적인 소프라노 조수미 초빙석학교수와의 협력으로 ‘조수미 아트&테크 연구센터’를 설립하고, AI 기반의 인터랙티브 공연 기술, 몰입형 콘텐츠 등 예술과 공학의 융합 연구를 선도해왔다. 이번 ‘AI 엔터테크 연구센터’ 설립은 K-콘텐츠 산업의 기술적 확장을 위한 새로운 도전으로 평가받고 있다.
또한, 갤럭시코퍼레이션 소속 아티스트이자 KAIST 기계공학과 초빙교수로 활동 중인 가수 지드래곤(본명 권지용)의 역할도 큰 계기가 됐다. 권 교수는 작년 KAIST에 임명된 이후, 엔터테인먼트와 첨단기술을 융합하는 ‘AI 엔터테크’ 분야의 발전을 위해 소속사를 통해 KAIST 연구과제를 공모하고 연구센터 설립을 적극 추진해 왔다.
AI 엔터테크 연구센터는 올해 3분기 정식 출범을 앞두고 있으며, 이번 현판식은 권지용 교수의 KAIST 방문 일정에 맞춰 진행됐다. 갤럭시코퍼레이션은 최근 마이크로소프트(MS) 나델라 CEO와 유일하게 엔터테크 기업 자격으로 비공개 간담회를 가지며, AI 엔터테크의 글로벌화를 본격 추진하고 있다. 또한 지난해부터 KAIST와 협력 관계를 구축, 연구센터 설립을 통해 시공간을 초월하는 엔터와 테크의 융합을 적극적으로 모색한다는 방침이다.
권지용 교수는 이날 오후 KAIST 류근철 스포츠컴플렉스에서 열리는 KAIST와 헤럴드미디어그룹, 국가과학기술연구회가 공동 주최하는 ‘이노베이트 코리아 2025’ 행사에 참석해, ‘AI 엔터테크의 미래’를 주제로 스페셜 토크에 나선다. 이번 토크쇼에는 권 교수 외에도 KAIST 기계공학과 이승섭 교수, 경희대학교 김상균 교수, 갤럭시코퍼레이션 최용호 대표가 함께 참여한다.
양 기관은 지난해 K-팝 글로벌 확산을 위한 과학기술 공동연구를 골자로 MOU를 체결한 바 있으며, 이번 연구센터 설립은 그 실질적인 첫 결실이다. 연구센터가 본격적으로 가동되면, AI 기반 엔터테크 플랫폼 개발, 글로벌 콘텐츠 기술 공동연구 등 다양한 프로젝트가 추진될 예정이다.
최용호 갤럭시코퍼레이션 CHO(Chief Happiness Officer)는 “이번 협력은 KAIST AI 및 최첨단 기술을 팬덤 플랫폼에 접목시켜 전 세계 팬들에게 완전히 새로운 엔터테인먼트 경험을 제공하는 출발점”이라며 “AI 엔터테크의 융합은 단순한 기술적 진보를 넘어 인류의 삶을 더욱 풍요롭게 변화시키는 혁신의 원동력”이라고 전했다.
이광형 총장은 “KAIST의 과학기술 역량이 권지용 교수의 글로벌 감각과 결합해, K-컬처의 기술적 진화를 이끌 것이라 확신한다”며, “KAIST의 도전정신과 연구 DNA가 엔터테크 시장에 새로운 물결을 일으키길 기대한다”고 밝혔다.
한편, 지드래곤 권지용 교수의 소속사인 갤럭시코퍼레이션은 IP, 미디어, 테크, 엔터테인먼트 융합 기술을 기반으로 새로운 패러다임을 제시하고 있는 AI 엔터테크 기업이다.
2025.04.09 조회수 2156 -
 기계공학과 김승우 명예교수, 삼성호암상 공학상 수상
초정밀 광계측 기술 개발로 산업 및 우주 항공분야에 새로운 패러다임을 연 기계공학과 김승우 명예교수가 2025 삼성호암상 공학상 수상자로 선정됐다.
김 교수는 1985년부터 기계공학과 교수로 재임하며 KAIST 광화학기술연구소 소장과 한국정밀공학회 회장을 역임했고 2012년부터 10년간 국가과학자로 선정되며 연구와 교육에 헌신해 왔다.
특히, 김 교수는 펨토초 레이저를 이용해 정밀도와 안정적인 제어를 획기적으로 향상시킨 초정밀 광계측 기술을 개척한 세계적인 권위자로 평가받는다. 해당 기술은 반도체·디스플레이 생산 공정의 결함 제거와 인공위성 간 거리 측정 등에서 활용되고 있다.
*펨토초: 1,000조분의 1초
호암상 수상자는 노벨상 수상자를 포함한 국내외 각 분야의 최고 전문가 46명으로 구성된 심사위원회와 전원 해외석학으로 이루어진 63명의 자문위원회가 참여하는 4개월에 걸친 심사를 거쳐 선정된다.
학술 부문에서는 혁신적인 연구와 헌신으로 과학과 기술의 한계를 넘어서며 인류 문명의 발전에 기여한 연구자들이 수상자로 선정된다. 부문별 수상자에게는 상장과 메달, 상금 3억원이 수여되며, 시상식은 오는 5월 30일에 열린다.
2025.04.02 조회수 1764
기계공학과 김승우 명예교수, 삼성호암상 공학상 수상
초정밀 광계측 기술 개발로 산업 및 우주 항공분야에 새로운 패러다임을 연 기계공학과 김승우 명예교수가 2025 삼성호암상 공학상 수상자로 선정됐다.
김 교수는 1985년부터 기계공학과 교수로 재임하며 KAIST 광화학기술연구소 소장과 한국정밀공학회 회장을 역임했고 2012년부터 10년간 국가과학자로 선정되며 연구와 교육에 헌신해 왔다.
특히, 김 교수는 펨토초 레이저를 이용해 정밀도와 안정적인 제어를 획기적으로 향상시킨 초정밀 광계측 기술을 개척한 세계적인 권위자로 평가받는다. 해당 기술은 반도체·디스플레이 생산 공정의 결함 제거와 인공위성 간 거리 측정 등에서 활용되고 있다.
*펨토초: 1,000조분의 1초
호암상 수상자는 노벨상 수상자를 포함한 국내외 각 분야의 최고 전문가 46명으로 구성된 심사위원회와 전원 해외석학으로 이루어진 63명의 자문위원회가 참여하는 4개월에 걸친 심사를 거쳐 선정된다.
학술 부문에서는 혁신적인 연구와 헌신으로 과학과 기술의 한계를 넘어서며 인류 문명의 발전에 기여한 연구자들이 수상자로 선정된다. 부문별 수상자에게는 상장과 메달, 상금 3억원이 수여되며, 시상식은 오는 5월 30일에 열린다.
2025.04.02 조회수 1764 -
 머리카락 1,000분의 1 나노섬유 혁신, 세계 최고 CO₂ 전해전지 개발
지구 온난화의 주범인 이산화탄소를 시장 가치가 높은 화학물질로 전환할 수만 있다면, 환경 문제를 해결함과 동시에 높은 경제적 가치를 창출할 수 있다. 국내 연구진이 이산화탄소(CO2)를 일산화탄소(CO)로 전환하는 고성능 ‘세라믹 전해전지’를 개발하여 탄소중립 실현을 위한 핵심 기술로 주목받고 있다.
우리 대학 기계공학과 이강택 교수 연구팀이 신소재 세라믹 나노 복합섬유를 개발해 현존 최고 성능의 이산화탄소 분해 성능을 갖는 세라믹 전해전지를 개발하는 데 성공했다고 1일 밝혔다.
세라믹 전해전지(SOEC)는 이산화탄소를 가치 있는 화학물질로 전환할 수 있는 유망한 에너지 변환 기술로 낮은 배출량과 높은 효율성이라는 추가적인 이점이 있다. 하지만 기존 세라믹 전해전지는 작동 온도가 800℃ 이상으로, 유지 비용이 크고 안정성이 낮아 상용화에 한계가 있었다.
이에 연구팀은 전기가 잘 통하는 ‘초이온전도체’ 소재를 기존 전극에 함께 섞어 만든 ‘복합 나노섬유 전극’을 개발해 전기화학 반응이 더 활발하게 일어나도록 설계하고, 이를 통해 세라믹 전해전지가 더 낮은 온도에서도 효율적으로 작동할 수 있는 기반을 마련했다.
나아가, 이러한 소재 복합을 통해 나노섬유의 두께를 약 45% 감소시키고, 전극을 머리카락보다 1,000배 가는 두께(100나노미터)로 제작하여 전기분해 반응이 일어나는 면적을 극대화하여, 세라믹 전해전지의 작동 온도를 낮추는 동시에 이산화탄소 분해 성능을 약 50% 향상시키는데 성공했다.
복합 나노섬유가 적용된 세라믹 전해전지는 기존에 보고된 소자 중 가장 높은 세계 최고 수준의 이산화탄소 분해 성능(700℃에서 1.25 A/cm2)을 기록했으며, 300시간의 장기 구동에도 안정적인 전압을 유지해 소재의 탁월함을 입증했다.
이강택 교수는 “이번 연구에서 제안된 나노섬유 전극의 제작 및 설계 기법은 이산화탄소 저감뿐만 아니라 그린수소 및 친환경 전력 생산과 같은 다양한 차세대 에너지 변환 소자의 개발에 있어 선도적인 기술이 될 것”이라고 말했다.
우리 대학 기계공학과 김민정 석사, 김형근 박사과정, 아크롬존 석사가 공동 제 1 저자로 참여하고, 한국지질지원연구원 정인철 박사, 기계공학과 오세은 박사과정, 윤가영 석사과정이 공동저자로 참여한 이번 연구는 촉매·재료 분야의 세계적 권위지인 ‘어플라이드 카탈리시스 B: 환경과 에너지, Applied Catalysis B: Environment and Energy (IF:20.3)’에 3월 3일 온라인 게재됐다. (논문명: Exceptional CO2 Reduction Performance in Symmetric Solid Oxide Electrolysis Cells Enabled via Nanofiber Heterointerface Engineering, https://doi.org/10.1016/j.apcatb.2025.125222)
한편, 이번 연구는 과학기술정보통신부 나노 및 소재 기술개발사업, 개인기초연구사업 지원으로 수행됐다.
2025.04.01 조회수 3614
머리카락 1,000분의 1 나노섬유 혁신, 세계 최고 CO₂ 전해전지 개발
지구 온난화의 주범인 이산화탄소를 시장 가치가 높은 화학물질로 전환할 수만 있다면, 환경 문제를 해결함과 동시에 높은 경제적 가치를 창출할 수 있다. 국내 연구진이 이산화탄소(CO2)를 일산화탄소(CO)로 전환하는 고성능 ‘세라믹 전해전지’를 개발하여 탄소중립 실현을 위한 핵심 기술로 주목받고 있다.
우리 대학 기계공학과 이강택 교수 연구팀이 신소재 세라믹 나노 복합섬유를 개발해 현존 최고 성능의 이산화탄소 분해 성능을 갖는 세라믹 전해전지를 개발하는 데 성공했다고 1일 밝혔다.
세라믹 전해전지(SOEC)는 이산화탄소를 가치 있는 화학물질로 전환할 수 있는 유망한 에너지 변환 기술로 낮은 배출량과 높은 효율성이라는 추가적인 이점이 있다. 하지만 기존 세라믹 전해전지는 작동 온도가 800℃ 이상으로, 유지 비용이 크고 안정성이 낮아 상용화에 한계가 있었다.
이에 연구팀은 전기가 잘 통하는 ‘초이온전도체’ 소재를 기존 전극에 함께 섞어 만든 ‘복합 나노섬유 전극’을 개발해 전기화학 반응이 더 활발하게 일어나도록 설계하고, 이를 통해 세라믹 전해전지가 더 낮은 온도에서도 효율적으로 작동할 수 있는 기반을 마련했다.
나아가, 이러한 소재 복합을 통해 나노섬유의 두께를 약 45% 감소시키고, 전극을 머리카락보다 1,000배 가는 두께(100나노미터)로 제작하여 전기분해 반응이 일어나는 면적을 극대화하여, 세라믹 전해전지의 작동 온도를 낮추는 동시에 이산화탄소 분해 성능을 약 50% 향상시키는데 성공했다.
복합 나노섬유가 적용된 세라믹 전해전지는 기존에 보고된 소자 중 가장 높은 세계 최고 수준의 이산화탄소 분해 성능(700℃에서 1.25 A/cm2)을 기록했으며, 300시간의 장기 구동에도 안정적인 전압을 유지해 소재의 탁월함을 입증했다.
이강택 교수는 “이번 연구에서 제안된 나노섬유 전극의 제작 및 설계 기법은 이산화탄소 저감뿐만 아니라 그린수소 및 친환경 전력 생산과 같은 다양한 차세대 에너지 변환 소자의 개발에 있어 선도적인 기술이 될 것”이라고 말했다.
우리 대학 기계공학과 김민정 석사, 김형근 박사과정, 아크롬존 석사가 공동 제 1 저자로 참여하고, 한국지질지원연구원 정인철 박사, 기계공학과 오세은 박사과정, 윤가영 석사과정이 공동저자로 참여한 이번 연구는 촉매·재료 분야의 세계적 권위지인 ‘어플라이드 카탈리시스 B: 환경과 에너지, Applied Catalysis B: Environment and Energy (IF:20.3)’에 3월 3일 온라인 게재됐다. (논문명: Exceptional CO2 Reduction Performance in Symmetric Solid Oxide Electrolysis Cells Enabled via Nanofiber Heterointerface Engineering, https://doi.org/10.1016/j.apcatb.2025.125222)
한편, 이번 연구는 과학기술정보통신부 나노 및 소재 기술개발사업, 개인기초연구사업 지원으로 수행됐다.
2025.04.01 조회수 3614 -
 피부에 부착할 수 있는 촉감 전달 패치 개발
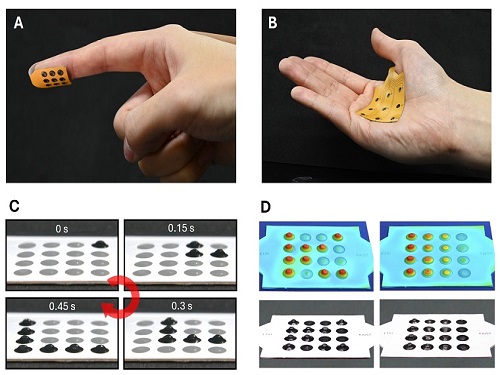
기계공학과 경기욱 교수 연구팀이 피부에 부착하여 다양한 촉감을 전달할 수 있는 초경량의 얇고 유연한 인공근육기반 촉감 전달 패치를 개발했다. 최근 가상현실(virtual reality, VR)과 증강현실(augmented reality, AR)의 기술이 각광받으면서, 더욱 현실감을 증대시키기 위해서 시각과 청각뿐만 아니라 촉각을 전달하는 기술이 중요한 역할을 하고 있다. 또한 사용자가 로봇을 원격조종하여 세밀한 작업을 하기 위해서는, 세밀한 촉감 전달이 필요하다. 그러나 단순한 진동이나 압력을 넘어서, 세밀하고 다양한 촉감을 전달할 수 있는 기술은 여전히 큰 도전이다.
개발된 촉감 구동기는 지름 6 mm, 두께 1.1 mm로 매우 작고 얇은 구조임에도 불구하고, 압력에서부터 고주파 진동까지 다양한 촉감을 전달할 수 있다. 또한 개발된 구동기는 32 mg 의 매우 가벼운 무게에도 불구하고 25 g의 추를 빠르게 밀어 올릴 수 있을 정도로 높은 출력밀도를 갖고 있다.
연구팀은 이 구동기를 손가락 끝 좁은 크기에 다수 배열하여 개별적으로 제어함으로써 다양한 촉감을 생성할 수 있는 햅틱 패치를 개발했다. 개발된 촉감 전달 패치는 얇고 유연하여 피부에 쉽게 부착되며, 가상 환경 속 물체의 3차원 형상과 표면질감을 정교하게 구현할 수 있다. 이 기술은 가상/증강 현실에서의 새로운 상호작용 방식을 제시하며, 차세대 촉감 전달 장치로서뿐만 아니라 초소형 로봇 등 다양한 분야에서도 활용될 것으로 기대된다.
본 연구는 졸업생 윤정환 박사의 박사학위 논문 연구로, 연구 결과는 지난 3월 국제학술지 ‘사이언스 어드벤시스(Science Advances)’ Vol.11(12)에 게재됐다. (논문명: Skin-attached haptic patch for versatile and augmented tactile interaction) 본 연구는 ETRI, UCLA와 공동으로 수행되었으며, 국가과학기술연구회(CRC23021-000) 및 한국전자통신연구원(24YB1700)의 지원을 받았다.
2025.03.28 조회수 2823
피부에 부착할 수 있는 촉감 전달 패치 개발
기계공학과 경기욱 교수 연구팀이 피부에 부착하여 다양한 촉감을 전달할 수 있는 초경량의 얇고 유연한 인공근육기반 촉감 전달 패치를 개발했다. 최근 가상현실(virtual reality, VR)과 증강현실(augmented reality, AR)의 기술이 각광받으면서, 더욱 현실감을 증대시키기 위해서 시각과 청각뿐만 아니라 촉각을 전달하는 기술이 중요한 역할을 하고 있다. 또한 사용자가 로봇을 원격조종하여 세밀한 작업을 하기 위해서는, 세밀한 촉감 전달이 필요하다. 그러나 단순한 진동이나 압력을 넘어서, 세밀하고 다양한 촉감을 전달할 수 있는 기술은 여전히 큰 도전이다.
개발된 촉감 구동기는 지름 6 mm, 두께 1.1 mm로 매우 작고 얇은 구조임에도 불구하고, 압력에서부터 고주파 진동까지 다양한 촉감을 전달할 수 있다. 또한 개발된 구동기는 32 mg 의 매우 가벼운 무게에도 불구하고 25 g의 추를 빠르게 밀어 올릴 수 있을 정도로 높은 출력밀도를 갖고 있다.
연구팀은 이 구동기를 손가락 끝 좁은 크기에 다수 배열하여 개별적으로 제어함으로써 다양한 촉감을 생성할 수 있는 햅틱 패치를 개발했다. 개발된 촉감 전달 패치는 얇고 유연하여 피부에 쉽게 부착되며, 가상 환경 속 물체의 3차원 형상과 표면질감을 정교하게 구현할 수 있다. 이 기술은 가상/증강 현실에서의 새로운 상호작용 방식을 제시하며, 차세대 촉감 전달 장치로서뿐만 아니라 초소형 로봇 등 다양한 분야에서도 활용될 것으로 기대된다.
본 연구는 졸업생 윤정환 박사의 박사학위 논문 연구로, 연구 결과는 지난 3월 국제학술지 ‘사이언스 어드벤시스(Science Advances)’ Vol.11(12)에 게재됐다. (논문명: Skin-attached haptic patch for versatile and augmented tactile interaction) 본 연구는 ETRI, UCLA와 공동으로 수행되었으며, 국가과학기술연구회(CRC23021-000) 및 한국전자통신연구원(24YB1700)의 지원을 받았다.
2025.03.28 조회수 2823