%EC%82%AC%EC%9D%B4%EC%96%B8%EC%8A%A4
-
 ‘노벨상 펀드’, HFSP 2025, 윤영규·신우정 교수 선정
생명과학 분야의 ‘노벨상 펀드’로 불리며, 지금까지 31명의 노벨상 수상자를 배출한 ‘휴먼 프론티어 사이언스 프로그램(HFSP)’에서 우리 대학 연구진이 2025년 수상자로 선정됐다. 이번 수상은 KAIST의 학제 간 융합연구와 혁신적 연구 역량이 다시 한 번 전 세계적으로 인정받았다는 점에서 큰 의미를 가진다.
우리 대학 전기및전자공학부 윤영규 교수와 바이오및뇌공학과 신우정 교수가 2025년 휴먼 프론티어 사이언스 프로그램(HFSP) 상을 받게 됐다고 1일 밝혔다. 두 교수는 올해 첫 선정자를 배출한 액셀러레이터 트랙에 선정되어 향후 2년간 약 10만 달러를 지원받게 된다.
휴먼 프론티어 사이언스 프로그램(HFSP)은 생명과학 분야 세계 최고 권위의 국제 연구 지원 프로그램으로, 독창적인 학제 간 융합 국제공동연구를 수행할 역량이 있는 연구자를 선별, 새로운 접근법으로 생명 기전을 밝히는 연구를 지원하자는 취지로 1997년 G7 국과 유럽연합의 주도로 설립됐다. 대한민국은 2004년부터 이사국으로 참여하고 있다.
전기및전자공학부 윤영규 교수는 광학적 뇌 기능 영상 촬영 및 분석을 주제로 다수의 국제적 협력연구와 선도연구를 수행해 인정받았으며, ‘조류 신경계 확산광단층촬영 데이터 분석’연구를 주제로 미국 텍사스오스틴 대학교 보테로 교수, 미국 워싱턴 대학교 컬버 교수, 독일 보훔 루르 대학교 군투르쿤 교수와 한 팀을 구성하여 환경적, 진화적 요인이 신경계에 미치는 영향에 관해 연구할 예정이다.
윤 교수는 “뇌과학 기술을 연구하는 전자공학자로서 우수한 생명과학 연구자들에게 주어지는 HFSP 상을 받게 되어 영광이고 뇌과학 기술의 발전에 반드시 기여하겠다”고 소감을 밝혔다.
한편, 바이오및뇌공학과 신우정 교수는 ‘신경생리학에서 피부 마이크로바이옴, 면역계, 감각신경계의 상호작용 연구’를 주제로 영국 임페리얼 칼리지 런던의 시모네 드 지오바니 교수, 미국 예일 대학교 롱 판 교수, 이스라엘 와이즈만 과학 연구소의 이란 일리납 교수와 한 팀을 구성해 피부 마이크로바이옴-면역-신경계의 복잡한 상호작용에 대해 피부 환경을 모사하는 사람 ‘피부모사칩’을 활용해 연구를 진행할 예정이다.
신 교수는 “이번 연구를 통해 순수과학과 공학의 절묘한 만남을 구현해 보고 싶고, 공학적 접근법을 이용해 피부 마이크로바이옴을 세계적인 과학자들과 함께 연구할 수 있는 훌륭한 기회를 얻어 영광이다”라고 소감을 밝혔다.
한편, 휴먼 프론티어 사이언스 프로그램(HFSP)은 1989년 설립 이래로 73개국, 8,500명 이상의 연구자를 지원했으며, 우리나라는 2025년 지원 대상자를 포함해 총 83명이 지원을 받았다.
2025.04.01 조회수 1624
‘노벨상 펀드’, HFSP 2025, 윤영규·신우정 교수 선정
생명과학 분야의 ‘노벨상 펀드’로 불리며, 지금까지 31명의 노벨상 수상자를 배출한 ‘휴먼 프론티어 사이언스 프로그램(HFSP)’에서 우리 대학 연구진이 2025년 수상자로 선정됐다. 이번 수상은 KAIST의 학제 간 융합연구와 혁신적 연구 역량이 다시 한 번 전 세계적으로 인정받았다는 점에서 큰 의미를 가진다.
우리 대학 전기및전자공학부 윤영규 교수와 바이오및뇌공학과 신우정 교수가 2025년 휴먼 프론티어 사이언스 프로그램(HFSP) 상을 받게 됐다고 1일 밝혔다. 두 교수는 올해 첫 선정자를 배출한 액셀러레이터 트랙에 선정되어 향후 2년간 약 10만 달러를 지원받게 된다.
휴먼 프론티어 사이언스 프로그램(HFSP)은 생명과학 분야 세계 최고 권위의 국제 연구 지원 프로그램으로, 독창적인 학제 간 융합 국제공동연구를 수행할 역량이 있는 연구자를 선별, 새로운 접근법으로 생명 기전을 밝히는 연구를 지원하자는 취지로 1997년 G7 국과 유럽연합의 주도로 설립됐다. 대한민국은 2004년부터 이사국으로 참여하고 있다.
전기및전자공학부 윤영규 교수는 광학적 뇌 기능 영상 촬영 및 분석을 주제로 다수의 국제적 협력연구와 선도연구를 수행해 인정받았으며, ‘조류 신경계 확산광단층촬영 데이터 분석’연구를 주제로 미국 텍사스오스틴 대학교 보테로 교수, 미국 워싱턴 대학교 컬버 교수, 독일 보훔 루르 대학교 군투르쿤 교수와 한 팀을 구성하여 환경적, 진화적 요인이 신경계에 미치는 영향에 관해 연구할 예정이다.
윤 교수는 “뇌과학 기술을 연구하는 전자공학자로서 우수한 생명과학 연구자들에게 주어지는 HFSP 상을 받게 되어 영광이고 뇌과학 기술의 발전에 반드시 기여하겠다”고 소감을 밝혔다.
한편, 바이오및뇌공학과 신우정 교수는 ‘신경생리학에서 피부 마이크로바이옴, 면역계, 감각신경계의 상호작용 연구’를 주제로 영국 임페리얼 칼리지 런던의 시모네 드 지오바니 교수, 미국 예일 대학교 롱 판 교수, 이스라엘 와이즈만 과학 연구소의 이란 일리납 교수와 한 팀을 구성해 피부 마이크로바이옴-면역-신경계의 복잡한 상호작용에 대해 피부 환경을 모사하는 사람 ‘피부모사칩’을 활용해 연구를 진행할 예정이다.
신 교수는 “이번 연구를 통해 순수과학과 공학의 절묘한 만남을 구현해 보고 싶고, 공학적 접근법을 이용해 피부 마이크로바이옴을 세계적인 과학자들과 함께 연구할 수 있는 훌륭한 기회를 얻어 영광이다”라고 소감을 밝혔다.
한편, 휴먼 프론티어 사이언스 프로그램(HFSP)은 1989년 설립 이래로 73개국, 8,500명 이상의 연구자를 지원했으며, 우리나라는 2025년 지원 대상자를 포함해 총 83명이 지원을 받았다.
2025.04.01 조회수 1624 -
 백세범 교수, 사이언스 어드밴시스 부편집장 임명
우리 대학 뇌인지과학과 백세범 교수가 세계적 권위의 과학 학술지인 사이언스 어드밴시스 (Science Advances)의 신경과학 (Neuroscience) 분과 부편집장(Associate Editor)으로 임명됐다고 14일 밝혔다.
이는 계산 신경과학 기반의 뇌 연구를 선도하고 있는 연구자인 백세범 교수의 탁월한 학문적 영향력과 학술적 소통 역량이 세계적으로 인정받은 성과다.
백세범 교수는 신경과학의 난제 중 하나였던 시각피질 뇌 지도 발생의 원리*를 세계 최초로 밝힌 이래, 지난 10여 년간의 연구를 통해 독창적인 이론 연구의 전문성을 인정받고 있다.
*시각피질 뇌 지도 발생의 원리: 포유류의 시각피질에서는 서로 다른 시각 정보(예: 색상, 방향 등)에 선택적으로 반응하는 신경세포들이 일정한 패턴을 이루며 배치되어 있는데 이를 기능성 뇌 지도(functional map)라고 함. 이 연구에서는 수학적 모델에 기반한 컴퓨터 시뮬레이션을 통하여 망막에 있는 신경세포들이 매우 단순한 물리적 상호작용에 따라 스스로 규칙적인 배열을 형성할 수 있으며 이렇게 형성된 구조가 시각피질에 투영되면서 다양한 기능성 뇌 지도가 만들어진다는 것을 설명하였음.
사이언스 어드밴시스는 미국 과학 진흥 협회(AAAS)가 발행하는 사이언스(Science) 저널의 온라인 자매지로, 과학 전 분야에 걸친 영향력 있는 연구를 다룬다. 2024년 기준 게재 승인 비율(acceptance rate)이 8.2%에 불과할 정도로 높은 수준의 연구 결과를 요구하며, 엄격한 검토 과정을 거친다.
백 교수는 신경과학 분과에서 연구 논문의 심사와 편집 업무에 참여하며, 전 세계 연구자들에게 중요한 과학적 발견을 전파하는 데 핵심적인 역할을 수행한다.
백 교수는 국내 1세대 계산신경과학자로서 이론적 모델 기반의 뇌 연구를 통해 신경과학의 다양한 현상들을 체계적으로 연계하여 설명하는 계산신경과학분야를 개척하고 있다.
최근에는 뇌신경망과 인공신경망의 비교에 기반한 인지 지능 발생 이론 연구들을 진행하며, 인간과 동물의 지능, 그리고 인공지능을 하나의 큰 틀에서 이해하려는 연구를 활발히 진행하고 있다.
백 교수는 그동안 스프링거-네이쳐(Springer-Nature)와 프론티어스(Frontiers) 그룹에서 발행하는 신경과학 저널들의 부편집장 및 편집위원으로 활동해 왔다. 2021년에는 KAIST 특이점 교수(Singularity Professor)에 임명되었으며, 2024년부터는 한국계산뇌과학회(CBrain) 회장직을 맡아 학회를 이끌고 있다.
백세범 교수는 “KAIST 교수진으로서 권위 있는 학술지의 편집위원으로 활동하게 되어 매우 기쁘며, 앞으로 뇌신경과학 분야의 다양한 연구 결과들의 심사 및 출판 과정을 진행하면서, 전 세계 연구자들과 교류를 통해 뇌신경과학 연구의 발전과 방향 설정에 기여하고 싶다”고 소감을 전했다.
2025.03.14 조회수 1832
백세범 교수, 사이언스 어드밴시스 부편집장 임명
우리 대학 뇌인지과학과 백세범 교수가 세계적 권위의 과학 학술지인 사이언스 어드밴시스 (Science Advances)의 신경과학 (Neuroscience) 분과 부편집장(Associate Editor)으로 임명됐다고 14일 밝혔다.
이는 계산 신경과학 기반의 뇌 연구를 선도하고 있는 연구자인 백세범 교수의 탁월한 학문적 영향력과 학술적 소통 역량이 세계적으로 인정받은 성과다.
백세범 교수는 신경과학의 난제 중 하나였던 시각피질 뇌 지도 발생의 원리*를 세계 최초로 밝힌 이래, 지난 10여 년간의 연구를 통해 독창적인 이론 연구의 전문성을 인정받고 있다.
*시각피질 뇌 지도 발생의 원리: 포유류의 시각피질에서는 서로 다른 시각 정보(예: 색상, 방향 등)에 선택적으로 반응하는 신경세포들이 일정한 패턴을 이루며 배치되어 있는데 이를 기능성 뇌 지도(functional map)라고 함. 이 연구에서는 수학적 모델에 기반한 컴퓨터 시뮬레이션을 통하여 망막에 있는 신경세포들이 매우 단순한 물리적 상호작용에 따라 스스로 규칙적인 배열을 형성할 수 있으며 이렇게 형성된 구조가 시각피질에 투영되면서 다양한 기능성 뇌 지도가 만들어진다는 것을 설명하였음.
사이언스 어드밴시스는 미국 과학 진흥 협회(AAAS)가 발행하는 사이언스(Science) 저널의 온라인 자매지로, 과학 전 분야에 걸친 영향력 있는 연구를 다룬다. 2024년 기준 게재 승인 비율(acceptance rate)이 8.2%에 불과할 정도로 높은 수준의 연구 결과를 요구하며, 엄격한 검토 과정을 거친다.
백 교수는 신경과학 분과에서 연구 논문의 심사와 편집 업무에 참여하며, 전 세계 연구자들에게 중요한 과학적 발견을 전파하는 데 핵심적인 역할을 수행한다.
백 교수는 국내 1세대 계산신경과학자로서 이론적 모델 기반의 뇌 연구를 통해 신경과학의 다양한 현상들을 체계적으로 연계하여 설명하는 계산신경과학분야를 개척하고 있다.
최근에는 뇌신경망과 인공신경망의 비교에 기반한 인지 지능 발생 이론 연구들을 진행하며, 인간과 동물의 지능, 그리고 인공지능을 하나의 큰 틀에서 이해하려는 연구를 활발히 진행하고 있다.
백 교수는 그동안 스프링거-네이쳐(Springer-Nature)와 프론티어스(Frontiers) 그룹에서 발행하는 신경과학 저널들의 부편집장 및 편집위원으로 활동해 왔다. 2021년에는 KAIST 특이점 교수(Singularity Professor)에 임명되었으며, 2024년부터는 한국계산뇌과학회(CBrain) 회장직을 맡아 학회를 이끌고 있다.
백세범 교수는 “KAIST 교수진으로서 권위 있는 학술지의 편집위원으로 활동하게 되어 매우 기쁘며, 앞으로 뇌신경과학 분야의 다양한 연구 결과들의 심사 및 출판 과정을 진행하면서, 전 세계 연구자들과 교류를 통해 뇌신경과학 연구의 발전과 방향 설정에 기여하고 싶다”고 소감을 전했다.
2025.03.14 조회수 1832 -
 천천히 걸음 속도 높여도 다 아는 인공지능 기술 개발
최근 건강에 관한 관심이 점차 커지면서 일상생활에서 스마트 워치, 스마트 링 등을 통해 자기 신체 변화를 살펴보는 일이 보편화되었다. 그런데 기존 헬스케어 앱에서는 걷기에서 뛰기로 갑자기 변화를 줄 경우는 잘 측정이 되지만 천천히 속도를 높이는 경우는 측정이 안 되는 현상이 발생했다. 우리 연구진이 완만한 변화에도 동작을 정확하게 파악하는 기술을 개발했다.
우리 대학 전산학부 이재길 교수 연구팀이 다양한 착용 기기 센서 데이터에서 사용자 상태 변화를 정확하게 검출하는 새로운 인공지능 기술을 개발했다고 12일 밝혔다.
보통 헬스케어 앱에서는 센서 데이터를 통해 사용자의 상태 변화를 탐지하여 현재 동작을 정확히 인식하는 기능이 필수이다. 이를 변화점 탐지라 부르며 다양한 인공지능 기술이 변화점 탐지 품질을 향상하기 위해 적용되고 있다.
이재길 교수팀은 사용자의 상태가 급진적으로 변하거나 점진적으로 변하는지에 관계없이 정확하게 잘 동작하는 변화점 탐지 방법론을 개발했다.
연구팀은 각 시점의 센서 데이터를 인공지능 기술을 통해 벡터*로 표현하였을 때, 이러한 벡터가 시간이 지남에 따라 이동하는 방향을 주목하였다. 같은 동작이 유지될 때는 벡터가 이동하는 방향이 급변하는 경향이 크고, 동작이 바뀔 때는 벡터가 직선상으로 이동하는 경향이 크게 나타났다.
*벡터: 사용자의 시점별 상태 특성(이동속도, 자세, 움직임 등)을 나타내는 가장 좋은 수학적 개념
연구팀은 제안한 방법론을 ‘리커브(RECURVE)’라고 명명했다. 리커브(RECURVE)는 양궁 경기에 쓰이는 활의 한 종류이며, 활이 휘어 있는 모습이 데이터의 이동 방향 변화 정도(곡률)로 변화점을 탐지하는 본 방법론의 동작 방식을 잘 나타낸다고 보았다. 이 방법은 변화점 탐지의 기준을 거리에서 곡률이라는 새로운 관점으로 바라본 매우 신선한 방법이라는 평가를 받았다.
연구팀은 변화점 탐지 문제에서 다양한 헬스케어 센서 스트림 데이터를 사용하여 방법론의 우수성을 검증하여 기존 방법론에 비해 최대 12.7% 정확도 향상을 달성했다.
연구팀을 지도한 이재길 교수는 "센서 스트림 데이터 변화점 탐지 분야의 새로운 지평을 열 만한 획기적인 방법이며 실용화 및 기술 이전이 이뤄지면 실시간 데이터 분석 연구 및 디지털 헬스케어 산업에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
데이터사이언스대학원을 졸업한 신유주 박사가 제1 저자, 전산학부 박재현 석사과정 학생이 제2 저자로 참여한 이번 연구는 최고권위 국제학술대회 `신경정보처리시스템학회(NeurIPS) 2024'에서 올 12월 발표될 예정이다. (논문명 : Exploiting Representation Curvature for Boundary Detection in Time Series)
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 SW컴퓨팅산업원천기술개발사업 SW스타랩 과제로 개발한 연구성과 결과물(RS-2020-II200862, DB4DL: 딥러닝 지원 고사용성 및 고성능 분산 인메모리 DBMS 개발)이다.
2024.11.12 조회수 4121
천천히 걸음 속도 높여도 다 아는 인공지능 기술 개발
최근 건강에 관한 관심이 점차 커지면서 일상생활에서 스마트 워치, 스마트 링 등을 통해 자기 신체 변화를 살펴보는 일이 보편화되었다. 그런데 기존 헬스케어 앱에서는 걷기에서 뛰기로 갑자기 변화를 줄 경우는 잘 측정이 되지만 천천히 속도를 높이는 경우는 측정이 안 되는 현상이 발생했다. 우리 연구진이 완만한 변화에도 동작을 정확하게 파악하는 기술을 개발했다.
우리 대학 전산학부 이재길 교수 연구팀이 다양한 착용 기기 센서 데이터에서 사용자 상태 변화를 정확하게 검출하는 새로운 인공지능 기술을 개발했다고 12일 밝혔다.
보통 헬스케어 앱에서는 센서 데이터를 통해 사용자의 상태 변화를 탐지하여 현재 동작을 정확히 인식하는 기능이 필수이다. 이를 변화점 탐지라 부르며 다양한 인공지능 기술이 변화점 탐지 품질을 향상하기 위해 적용되고 있다.
이재길 교수팀은 사용자의 상태가 급진적으로 변하거나 점진적으로 변하는지에 관계없이 정확하게 잘 동작하는 변화점 탐지 방법론을 개발했다.
연구팀은 각 시점의 센서 데이터를 인공지능 기술을 통해 벡터*로 표현하였을 때, 이러한 벡터가 시간이 지남에 따라 이동하는 방향을 주목하였다. 같은 동작이 유지될 때는 벡터가 이동하는 방향이 급변하는 경향이 크고, 동작이 바뀔 때는 벡터가 직선상으로 이동하는 경향이 크게 나타났다.
*벡터: 사용자의 시점별 상태 특성(이동속도, 자세, 움직임 등)을 나타내는 가장 좋은 수학적 개념
연구팀은 제안한 방법론을 ‘리커브(RECURVE)’라고 명명했다. 리커브(RECURVE)는 양궁 경기에 쓰이는 활의 한 종류이며, 활이 휘어 있는 모습이 데이터의 이동 방향 변화 정도(곡률)로 변화점을 탐지하는 본 방법론의 동작 방식을 잘 나타낸다고 보았다. 이 방법은 변화점 탐지의 기준을 거리에서 곡률이라는 새로운 관점으로 바라본 매우 신선한 방법이라는 평가를 받았다.
연구팀은 변화점 탐지 문제에서 다양한 헬스케어 센서 스트림 데이터를 사용하여 방법론의 우수성을 검증하여 기존 방법론에 비해 최대 12.7% 정확도 향상을 달성했다.
연구팀을 지도한 이재길 교수는 "센서 스트림 데이터 변화점 탐지 분야의 새로운 지평을 열 만한 획기적인 방법이며 실용화 및 기술 이전이 이뤄지면 실시간 데이터 분석 연구 및 디지털 헬스케어 산업에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
데이터사이언스대학원을 졸업한 신유주 박사가 제1 저자, 전산학부 박재현 석사과정 학생이 제2 저자로 참여한 이번 연구는 최고권위 국제학술대회 `신경정보처리시스템학회(NeurIPS) 2024'에서 올 12월 발표될 예정이다. (논문명 : Exploiting Representation Curvature for Boundary Detection in Time Series)
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 SW컴퓨팅산업원천기술개발사업 SW스타랩 과제로 개발한 연구성과 결과물(RS-2020-II200862, DB4DL: 딥러닝 지원 고사용성 및 고성능 분산 인메모리 DBMS 개발)이다.
2024.11.12 조회수 4121 -
 세계 최초 원자 편집으로 신약 발굴 패러다임 바꿔
선도적 신약 개발에서는 약효의 핵심 원자를 손쉽고 빠르게 편집하는 신기술은 의약품 후보 발굴 과정을 혁신하는 원천 기술이자, 꿈의 기술로 여겨져 왔다. 우리 대학 연구진이 약효를 극대화하는 단일 원자 편집 기술 개발에 세계 최초 성공했다.
우리 대학 화학과 박윤수 교수 연구팀이 오각 고리 화합물인 퓨란의 산소 원자를 손쉽게 질소 원자로 편집·교정하여, 제약 분야에서 널리 활용되는 피롤 골격으로 직접 전환하는 원천 기술 개발에 성공했다고 8일 밝혔다.
해당 연구성과는 그 중요성을 인정받아 과학 분야 최고권위 학술지인 ‘사이언스(Science)’誌 에 지난 10월 3일 게재됐다. (논문명: Photocatalytic Furan-to-Pyrrole Conversion)
많은 의약품은 복잡한 화학 구조를 갖지만, 정작 이들의 효능은 단 하나의 핵심 원자에 의해 결정되기도 한다. 대표적으로, 산소, 질소와 같은 원자는 바이러스에 대한 약리 효과를 극대화 하는데 중추적인 역할을 한다.
이처럼 약물 분자 골격에 특정 원자를 도입했을 때 나타나는 효능을 ‘단일 원자 효과(Single Atom Effect)'라 한다. 선도적 신약 개발에서는 수많은 원자 종류 중 약효를 극대화하는 원자를 발굴하는 것이 핵심으로 여겨진다.
하지만, 단일 원자 효과를 평가하기 위해서는 다단계·고비용의 합성 과정이 필연적으로 요구되어 왔다. 산소 혹은 질소 등을 포함한 고리 골격은 고유의 안정성(방향족성)으로 인해 단일 원자만 선택적으로 편집하기 어렵기 때문이다.
박 교수 연구팀은 빛에너지를 활용하는 광촉매를 도입하여 해당 기술을 구현했다. 분자 가위 역할을 하는 광촉매 개발을 통해 오각 고리를 자유자재로 자르고 붙임으로써 상온·상압 조건에서 동작하는 단일 원자 교정 반응을 세계 최초로 성공시켰다.
들뜬 상태의 분자 가위가 단전자 산화 반응을 통해 퓨란의 산소를 제거하고, 질소 원자를 연이어 추가하는 새로운 반응 메커니즘을 발견했다고 연구팀 관계자는 전했다.
이번 연구의 제1 저자인 KAIST 화학과 김동현, 유재현 석박사통합과정 학생은 “빛에너지를 활용해 가혹한 조건을 대체하여 해당 기술이 높은 활용성을 가질 수 있었다”며, “복잡한 구조로 이루어진 천연물이나 의약품들을 기질로 활용해도 선택적으로 목표 편집이 수행된다”고 이번 연구의 범용성을 설명했다.
이번 연구를 이끈 박윤수 교수는 “오각 고리형 유기 물질의 골격을 선택적으로 편집할 수 있게 됨에 따라, 제약 분야의 중요한 숙제였던 의약품 후보 물질의 라이브러리 구축에 새로운 장을 열 것”이라 언급하며, “해당 기반 기술이 신약 개발 과정을 혁신하는데 쓰이기를 바란다”고 덧붙였다.
해당 내용은 ‘사이언스(Science)’誌 내의 퍼스텍티브(Perspective) 섹션에 추가로 선정되어 연구의 의의가 소개되기도 하였다. 이는 해당 연구에 참여하지 않은 저명한 과학자가 파급력 있는 연구를 선별하여 해설을 제공하는 코너다.
한편 이번 연구는 한국연구재단의 우수신진연구, KAIST 교내연구사업 도약연구 및 초세대협업연구실, 포스코청암재단의 포스코 사이언스펠로십의 재원을 바탕으로 수행됐다.
2024.10.10 조회수 6759
세계 최초 원자 편집으로 신약 발굴 패러다임 바꿔
선도적 신약 개발에서는 약효의 핵심 원자를 손쉽고 빠르게 편집하는 신기술은 의약품 후보 발굴 과정을 혁신하는 원천 기술이자, 꿈의 기술로 여겨져 왔다. 우리 대학 연구진이 약효를 극대화하는 단일 원자 편집 기술 개발에 세계 최초 성공했다.
우리 대학 화학과 박윤수 교수 연구팀이 오각 고리 화합물인 퓨란의 산소 원자를 손쉽게 질소 원자로 편집·교정하여, 제약 분야에서 널리 활용되는 피롤 골격으로 직접 전환하는 원천 기술 개발에 성공했다고 8일 밝혔다.
해당 연구성과는 그 중요성을 인정받아 과학 분야 최고권위 학술지인 ‘사이언스(Science)’誌 에 지난 10월 3일 게재됐다. (논문명: Photocatalytic Furan-to-Pyrrole Conversion)
많은 의약품은 복잡한 화학 구조를 갖지만, 정작 이들의 효능은 단 하나의 핵심 원자에 의해 결정되기도 한다. 대표적으로, 산소, 질소와 같은 원자는 바이러스에 대한 약리 효과를 극대화 하는데 중추적인 역할을 한다.
이처럼 약물 분자 골격에 특정 원자를 도입했을 때 나타나는 효능을 ‘단일 원자 효과(Single Atom Effect)'라 한다. 선도적 신약 개발에서는 수많은 원자 종류 중 약효를 극대화하는 원자를 발굴하는 것이 핵심으로 여겨진다.
하지만, 단일 원자 효과를 평가하기 위해서는 다단계·고비용의 합성 과정이 필연적으로 요구되어 왔다. 산소 혹은 질소 등을 포함한 고리 골격은 고유의 안정성(방향족성)으로 인해 단일 원자만 선택적으로 편집하기 어렵기 때문이다.
박 교수 연구팀은 빛에너지를 활용하는 광촉매를 도입하여 해당 기술을 구현했다. 분자 가위 역할을 하는 광촉매 개발을 통해 오각 고리를 자유자재로 자르고 붙임으로써 상온·상압 조건에서 동작하는 단일 원자 교정 반응을 세계 최초로 성공시켰다.
들뜬 상태의 분자 가위가 단전자 산화 반응을 통해 퓨란의 산소를 제거하고, 질소 원자를 연이어 추가하는 새로운 반응 메커니즘을 발견했다고 연구팀 관계자는 전했다.
이번 연구의 제1 저자인 KAIST 화학과 김동현, 유재현 석박사통합과정 학생은 “빛에너지를 활용해 가혹한 조건을 대체하여 해당 기술이 높은 활용성을 가질 수 있었다”며, “복잡한 구조로 이루어진 천연물이나 의약품들을 기질로 활용해도 선택적으로 목표 편집이 수행된다”고 이번 연구의 범용성을 설명했다.
이번 연구를 이끈 박윤수 교수는 “오각 고리형 유기 물질의 골격을 선택적으로 편집할 수 있게 됨에 따라, 제약 분야의 중요한 숙제였던 의약품 후보 물질의 라이브러리 구축에 새로운 장을 열 것”이라 언급하며, “해당 기반 기술이 신약 개발 과정을 혁신하는데 쓰이기를 바란다”고 덧붙였다.
해당 내용은 ‘사이언스(Science)’誌 내의 퍼스텍티브(Perspective) 섹션에 추가로 선정되어 연구의 의의가 소개되기도 하였다. 이는 해당 연구에 참여하지 않은 저명한 과학자가 파급력 있는 연구를 선별하여 해설을 제공하는 코너다.
한편 이번 연구는 한국연구재단의 우수신진연구, KAIST 교내연구사업 도약연구 및 초세대협업연구실, 포스코청암재단의 포스코 사이언스펠로십의 재원을 바탕으로 수행됐다.
2024.10.10 조회수 6759 -
 K-하이테크 플랫폼 개소식 및 공동세미나 개최
우리 대학이 지난달 27일 경기도 화성시 동탄에 위치한 KAIST-화성 사이언스 허브에서 K-하이테크 플랫폼(센터장 김소영, 과학기술정책대학원 교수) 개소식 및 공동세미나를 개최했다.
K-하이테크 플랫폼은 이차전지, 지능형로봇, 첨단소재, 차세대반도체, 차세대디스플레이, 바이오헬스, 에코업, 신재생에너지, 수소, 양자, 우주, 나노, 기타 신기술 등 국가 경쟁력과 직결되는 핵심 산업의 인재를 양성하는 사업으로 고용노동부가 주관한다. 우리 대학은 지난해 6월 사업 수행기관으로 선정돼 5년간 30억 원의 예산을 지원받아 첨단산업 종사자 · 관심 있는 재직자 · 채용예정자 · 구직자 등을 대상으로 인재를 양성할 예정이다. 특히, 우리 대학 K-하이테크 플랫폼은 세계 수준의 연구 및 교육 성과와 인프라를 바탕으로 인공지능·스마트팩토리·협동로봇·반도체설계 등을 교육한다. 통합형 창의교육 플랫폼을 바탕으로 콘텐츠를 개발해 현장에 적용하고 첨단 분야의 다양한 기업들과 연계해 교육 - 콘텐츠 기획 - 시제품 제작지원 - 기술지원 - 성과전시까지 이어지는 다양한 프로그램을 기획하고 있다.
이날 열린 개소식에는 우리 대학, 화성시, 공동주관기관, 첨단산업기업 등 내·외 관계자 150여 명이 참석했다. 강준혁 전기및전자공학부 학부장, 김소영 K-하이테크 플랫폼 센터장이 환영사하고 박동준 한국산업인력공단 경인지역본부장, 김승희 고용노동부 수원고용센터 소장이 축사했으며, 테이프 커팅 및 현판식이 진행됐다.이어진 KAIST, LG이노텍, 이대서울병원, 한국광융합산업진흥회 공동 주관 세미나에서는 이현주 전기및전자공학부 교수가 '첨단산업과 뇌과학'을 주제로 기조강연하고 유창동 전기및전자공학부 교수는 '생성형 인공지능 기술 동향'을 발표하고 장동의 교수가 좌장을 맡은 좌담회를 열어 신정규 래블업(주) 대표와 심도 있는 토론을 진행했다.
또한, 전상훈 전기및전자공학부 교수가 '반도체산업 기술 동향 및 전망'을 주제로 발표하고 맹원영 내로우채널 대표가 좌장을 맡아 최창주 ㈜제이엠반도체 전무와 김준호 렛유인에듀 대표가 함께 토론을 벌였다.
마지막 세션에서는 전미애 K-하이테크 플랫폼 부센터장이 국가인적자원개발 플랫폼 사업을 소개하고 우송대학교 조남채 교수, 공동주관기관 전담자, 직업훈련전문가, 일반 참여자가 함께하는 자유토론이 진행됐다.김소영 KAIST K-하이테크 플랫폼 센터장은 "인공지능, 반도체, 빅데이터, 바이오헬스 등 첨단 신기술 분야 산업인력 훈련의 중요성이 커지고 있는 시기에 거시적인 변화에 가장 적절히 대응할 수 있는 인력 훈련 체계를 마련하였다는 점에서 국가적으로 매우 뜻깊은 사업"이라고 강조했다. 이어, "과학기술인력 양성의 산실인 KAIST가 첨단 신기술 분야에서 인력 훈련과 현장 중심 산학협력을 고도화하는 본보기를 보여줄 것"이라고 덧붙였다.
2024.07.01 조회수 4968
K-하이테크 플랫폼 개소식 및 공동세미나 개최
우리 대학이 지난달 27일 경기도 화성시 동탄에 위치한 KAIST-화성 사이언스 허브에서 K-하이테크 플랫폼(센터장 김소영, 과학기술정책대학원 교수) 개소식 및 공동세미나를 개최했다.
K-하이테크 플랫폼은 이차전지, 지능형로봇, 첨단소재, 차세대반도체, 차세대디스플레이, 바이오헬스, 에코업, 신재생에너지, 수소, 양자, 우주, 나노, 기타 신기술 등 국가 경쟁력과 직결되는 핵심 산업의 인재를 양성하는 사업으로 고용노동부가 주관한다. 우리 대학은 지난해 6월 사업 수행기관으로 선정돼 5년간 30억 원의 예산을 지원받아 첨단산업 종사자 · 관심 있는 재직자 · 채용예정자 · 구직자 등을 대상으로 인재를 양성할 예정이다. 특히, 우리 대학 K-하이테크 플랫폼은 세계 수준의 연구 및 교육 성과와 인프라를 바탕으로 인공지능·스마트팩토리·협동로봇·반도체설계 등을 교육한다. 통합형 창의교육 플랫폼을 바탕으로 콘텐츠를 개발해 현장에 적용하고 첨단 분야의 다양한 기업들과 연계해 교육 - 콘텐츠 기획 - 시제품 제작지원 - 기술지원 - 성과전시까지 이어지는 다양한 프로그램을 기획하고 있다.
이날 열린 개소식에는 우리 대학, 화성시, 공동주관기관, 첨단산업기업 등 내·외 관계자 150여 명이 참석했다. 강준혁 전기및전자공학부 학부장, 김소영 K-하이테크 플랫폼 센터장이 환영사하고 박동준 한국산업인력공단 경인지역본부장, 김승희 고용노동부 수원고용센터 소장이 축사했으며, 테이프 커팅 및 현판식이 진행됐다.이어진 KAIST, LG이노텍, 이대서울병원, 한국광융합산업진흥회 공동 주관 세미나에서는 이현주 전기및전자공학부 교수가 '첨단산업과 뇌과학'을 주제로 기조강연하고 유창동 전기및전자공학부 교수는 '생성형 인공지능 기술 동향'을 발표하고 장동의 교수가 좌장을 맡은 좌담회를 열어 신정규 래블업(주) 대표와 심도 있는 토론을 진행했다.
또한, 전상훈 전기및전자공학부 교수가 '반도체산업 기술 동향 및 전망'을 주제로 발표하고 맹원영 내로우채널 대표가 좌장을 맡아 최창주 ㈜제이엠반도체 전무와 김준호 렛유인에듀 대표가 함께 토론을 벌였다.
마지막 세션에서는 전미애 K-하이테크 플랫폼 부센터장이 국가인적자원개발 플랫폼 사업을 소개하고 우송대학교 조남채 교수, 공동주관기관 전담자, 직업훈련전문가, 일반 참여자가 함께하는 자유토론이 진행됐다.김소영 KAIST K-하이테크 플랫폼 센터장은 "인공지능, 반도체, 빅데이터, 바이오헬스 등 첨단 신기술 분야 산업인력 훈련의 중요성이 커지고 있는 시기에 거시적인 변화에 가장 적절히 대응할 수 있는 인력 훈련 체계를 마련하였다는 점에서 국가적으로 매우 뜻깊은 사업"이라고 강조했다. 이어, "과학기술인력 양성의 산실인 KAIST가 첨단 신기술 분야에서 인력 훈련과 현장 중심 산학협력을 고도화하는 본보기를 보여줄 것"이라고 덧붙였다.
2024.07.01 조회수 4968 -
 강준상˙김재경˙박윤수˙박지민˙홍성우 교수, 포스코 사이언스 펠로십 선정
기초과학과 응용과학을 연구하는 젊은 유능한 과학자들을 매년 선발해 지원하는 포스코 사이언스펠로십에 우리 대학 신진 교수가 대거 선정됐다.포스코 청암재단은 수학·물리학·화학·생명과학·금속/신소재·에너지소재 등 총 6개 분야에 걸쳐 30명의 연구자를 2024년도 펠로십 수혜자로 선정했다고 지난달 11일 발표했다. 우리 대학은 강준상(기계공학과), 김재경(생명과학과), 박윤수(화학과), 박지민(생명화학공학과), 홍성우(물리학과) 등 5인이 선정돼 올해 국내 대학 중 가장 많은 수의 포스코 사이언스 펠로를 보유한 대학이 됐다.강준상 기계공학과 교수는 UCLA 기계공학과에서 2019년도에 박사 학위를 받은 뒤 오리건주립대학교(OSU) 포스닥 펠로를 거쳐 2022년 8월에 우리 대학 기계공학과에 부임했다. 현재 첨단 열 및 에너지 전달 연구실에서 차세대 방열기술 및 소재 개발, 첨단 반도체 패키징에 관한 연구를 진행하고 있다.김재경 교수는 우리 대학 바이오및뇌공학과에서 2017년 박사 학위를 받은 뒤 캘리포니아 대학교 샌프란시스코 캠퍼스(UCSF)와 샌프란시스코 베테랑 어페어스(Veteran Affairs) 메디컬 센터에서 박사 후 연구원을 거쳤다. 올해 7월 우리 대학 생명과학과에 부임해 뇌과학·신경생물학·생리학·뇌질환 분야에서 활발한 연구 활동을 진행 중이며, 운동학습과 기억형성과정의 본질적인 신경 네트워크를 해석 및 변화유도에 중점을 두고 있다. 이와 함께, 쥐(Rats) 운동피질에 결합된 뇌-기계 인터페이스 시스템의 학습 원리 및 학습 증진법과 발견한 뇌의 작동원리에 기반해 뇌 손상 이후 회복을 증진시키는 뇌자극 기법에 대한 연구도 수행 중이다.박윤수 교수는 우리 대학 화학과에서 2019년 박사 학위를 받고, 프린스턴 대학교 박사 후 연구원 과정을 거쳐 2022년 우리 대학 화학과로 부임했다. 현재 지속가능 촉매 연구실에서 분자 단위의 조절을 통해 귀금속 촉매를 대체하는 차세대 촉매를 구현하고, 이를 활용해 전례 없는 유기 합성 반응을 탐구하고 있다.박지민 교수는 MIT 재료공학부에서 박사 학위를 받은 뒤 캘리포니아 공과대학(Caltech) 생명공학과에서 박사 후 연구원으로 재직했다. 올해 초 우리 대학 생명화학공학과에 부임했으며, 최근 과학기술정보통신부 '젊은 과학자 혁신 자문위원'으로 위촉되었다. 주 연구 분야는 '무생물-생물 인터페이스'로 인공 소재와 생명체를 연결하는 새로운 인터페이스를 개발 중이다. 연구팀은 해당 인터페이스를 이용한 바이오 및 소재 연구를 진행 중이며, 이번 포스코사이언스펠로십을 통해 금속 입자와 생체 분자가 결합한 신개념 촉매 소재를 발굴할 계획이다.홍성우 교수는 미국 메릴랜드 대학교 컬리지 파크에서 입자 이론 분야(theoretical particle physics)로 2017년에 박사 학위를 받았다. 코넬대에서 3년간의 박사 후 연구원을 거쳐 2020년부터 시카고 대학 엔리코 페르미 연구소(Enrico Fermi Institute at University of Chicago)와 아르곤 국립 연구소(Argonne National Laboratory)에서 공동 박사 후 연구원을 지냈다. 2022년 우리 대학 물리학과에 부임했으며, 입자 물리 및 우주론에 존재하는 다양한 난제에 대한 이론적 해결책을 제시하는 연구를 수행 중이다. 최근에는 범 지구 대칭(Generalized Global Symmetry)을 입자물리에 적용하여 새로운 돌파구를 찾는 연구를 주도하고 있다.선발된 연구자들에게 2년간 총 1억 원의 연구비를 지원하는 포스코사이언스펠로십은 탁월한 연구성과를 입증한 임용 3년 미만의 신진 교수를 대상으로 한다. 올해는 전국 17개 대학 307명의 신진교수가 지원서를 제출해 10대 1을 넘어서는 치열한 경쟁률을 보였으며, 이달 12일 서울 강남구 소재 포스코센터에서 증서 수여식을 개최했다.
2023.10.17 조회수 6723
강준상˙김재경˙박윤수˙박지민˙홍성우 교수, 포스코 사이언스 펠로십 선정
기초과학과 응용과학을 연구하는 젊은 유능한 과학자들을 매년 선발해 지원하는 포스코 사이언스펠로십에 우리 대학 신진 교수가 대거 선정됐다.포스코 청암재단은 수학·물리학·화학·생명과학·금속/신소재·에너지소재 등 총 6개 분야에 걸쳐 30명의 연구자를 2024년도 펠로십 수혜자로 선정했다고 지난달 11일 발표했다. 우리 대학은 강준상(기계공학과), 김재경(생명과학과), 박윤수(화학과), 박지민(생명화학공학과), 홍성우(물리학과) 등 5인이 선정돼 올해 국내 대학 중 가장 많은 수의 포스코 사이언스 펠로를 보유한 대학이 됐다.강준상 기계공학과 교수는 UCLA 기계공학과에서 2019년도에 박사 학위를 받은 뒤 오리건주립대학교(OSU) 포스닥 펠로를 거쳐 2022년 8월에 우리 대학 기계공학과에 부임했다. 현재 첨단 열 및 에너지 전달 연구실에서 차세대 방열기술 및 소재 개발, 첨단 반도체 패키징에 관한 연구를 진행하고 있다.김재경 교수는 우리 대학 바이오및뇌공학과에서 2017년 박사 학위를 받은 뒤 캘리포니아 대학교 샌프란시스코 캠퍼스(UCSF)와 샌프란시스코 베테랑 어페어스(Veteran Affairs) 메디컬 센터에서 박사 후 연구원을 거쳤다. 올해 7월 우리 대학 생명과학과에 부임해 뇌과학·신경생물학·생리학·뇌질환 분야에서 활발한 연구 활동을 진행 중이며, 운동학습과 기억형성과정의 본질적인 신경 네트워크를 해석 및 변화유도에 중점을 두고 있다. 이와 함께, 쥐(Rats) 운동피질에 결합된 뇌-기계 인터페이스 시스템의 학습 원리 및 학습 증진법과 발견한 뇌의 작동원리에 기반해 뇌 손상 이후 회복을 증진시키는 뇌자극 기법에 대한 연구도 수행 중이다.박윤수 교수는 우리 대학 화학과에서 2019년 박사 학위를 받고, 프린스턴 대학교 박사 후 연구원 과정을 거쳐 2022년 우리 대학 화학과로 부임했다. 현재 지속가능 촉매 연구실에서 분자 단위의 조절을 통해 귀금속 촉매를 대체하는 차세대 촉매를 구현하고, 이를 활용해 전례 없는 유기 합성 반응을 탐구하고 있다.박지민 교수는 MIT 재료공학부에서 박사 학위를 받은 뒤 캘리포니아 공과대학(Caltech) 생명공학과에서 박사 후 연구원으로 재직했다. 올해 초 우리 대학 생명화학공학과에 부임했으며, 최근 과학기술정보통신부 '젊은 과학자 혁신 자문위원'으로 위촉되었다. 주 연구 분야는 '무생물-생물 인터페이스'로 인공 소재와 생명체를 연결하는 새로운 인터페이스를 개발 중이다. 연구팀은 해당 인터페이스를 이용한 바이오 및 소재 연구를 진행 중이며, 이번 포스코사이언스펠로십을 통해 금속 입자와 생체 분자가 결합한 신개념 촉매 소재를 발굴할 계획이다.홍성우 교수는 미국 메릴랜드 대학교 컬리지 파크에서 입자 이론 분야(theoretical particle physics)로 2017년에 박사 학위를 받았다. 코넬대에서 3년간의 박사 후 연구원을 거쳐 2020년부터 시카고 대학 엔리코 페르미 연구소(Enrico Fermi Institute at University of Chicago)와 아르곤 국립 연구소(Argonne National Laboratory)에서 공동 박사 후 연구원을 지냈다. 2022년 우리 대학 물리학과에 부임했으며, 입자 물리 및 우주론에 존재하는 다양한 난제에 대한 이론적 해결책을 제시하는 연구를 수행 중이다. 최근에는 범 지구 대칭(Generalized Global Symmetry)을 입자물리에 적용하여 새로운 돌파구를 찾는 연구를 주도하고 있다.선발된 연구자들에게 2년간 총 1억 원의 연구비를 지원하는 포스코사이언스펠로십은 탁월한 연구성과를 입증한 임용 3년 미만의 신진 교수를 대상으로 한다. 올해는 전국 17개 대학 307명의 신진교수가 지원서를 제출해 10대 1을 넘어서는 치열한 경쟁률을 보였으며, 이달 12일 서울 강남구 소재 포스코센터에서 증서 수여식을 개최했다.
2023.10.17 조회수 6723 -
 넙죽이의 신세계 대모험 展 개최
우리 대학이 '넙죽이의 신세계 대모험' 展을 7월 한 달간 대전 신세계 아트앤사이언스 7층 대전 홍보관에서 개최한다.
KAIST 미술관(관장 석현정)은 이번 전시를 위해 우리 대학 재학생을 대상으로 지난 5월부터 약 3주간 전시회에 참여할 팬아트를 공모했다. 사진을 제외한 모든 종류의 시각 예술 장르로 공모를 진행한 결과 개인·동아리·단체 등 다양한 형태로 구성된 참가자들의 작품이 출품됐으며, 20점을 최종 선발해 꿈돌이와 함께 현재 전시되고 있다.
'넙죽이'는 2014년 만들어진 우리 대학의 캐릭터다. UI 하단의 그래픽 모티프를 활용해 푸른색 타원형 얼굴에 무표정한 눈이 드러나는 형태로 디자인됐다. 공개 당시에는 ‘여론의 수렴 없이 발표된 캐릭터’라는 비난을 받는 등 학내의 분분한 여론으로 홈페이지에서 삭제되기도 했다.
하지만, 온라인에서 학교 안팎의 누리꾼들이 원안을 활용한 다양한 디자인을 창작하며 화제를 모아 다시금 관심을 받게 됐으며, 이 과정에서 '넙죽이'라는 이름을 얻게 됐다. 기관이나 단체를 대표하는 대부분의 캐릭터는 관리자 주도로 생산 및 활용되는 반면, 우리 대학의 넙죽이는 캐릭터를 소비하는 학생들이 직접 2차 창작물을 생산하고 스토리텔링까지 성공해 활용하는 드문 사례다.
이번 콜라보 전시는 KAIST 미술관이 추진하는 '과학-예술 융·복합 창작스튜디오' 교육사업 중 하나다. 교내 학생 및 연구자들의 새로운 아이디어를 후원하고 미술관이 그 아이디어의 발생지가 될 수 있도록 구성원의 창의적인 협동작업을 지원하는 프로젝트를 추진 중이다. 이를 통해, 실험적인 아이디어를 창조력 있는 표현으로 발전시키는 동시에 작품을 관찰·토론·연구하는 교류 기회를 확대할 방침이다.
석현정 KAIST 미술관장은 "앞으로도 재학생들이 예술적인 경험을 확장할 수 있는 기회를 제공할 계획"이라며, "미술관이 문화를 소비하고 창조하는 곳이자 외부의 문화를 접하고 비교할 수 있는 곳으로 머리를 식히거나 가볍게 둘러보며 감각의 즐거움을 경험하는 공간이 되었으면 한다"라고 전했다.
한편, 넙죽이와 함께 전시된 꿈돌이는 93 대전엑스포의 공식 마스코트로 첨단 과학기술의 미래상을 표현하는 캐릭터이자 대전의 상징으로 활용되고 있다. 우리 대학 양현승 전산학부 명예교수가 개발한 지능형 이동로봇 CAIR-2는 엑스포 기간에 행사용으로 개량되어 꿈돌이와 꿈순이 캐릭터를 덧입고 방문객을 맞이하기도 했다. 이달 말일까지 열리는 '넙죽이의 신세계 대모험' 展은 누구나 무료로 관람할 수 있으며, 넙죽이를 활용한 다양한 판매 상품도 만나볼 수 있다.
▶ 참여 작가모니카 알부자(Monica Albuja, 건설및환경공학과), 김아령 (반도체시스템공학과), 김연수 (산업디자인학과), 김희진 (산업디자인학과), 박지윤 (생명과학과), 배준형 (문화기술대학원), 설예은 (생명과학과), 손소휘 (기계공학과), 송은영 (경영공학과), 신오륜 (산업디자인학과), 안치영 (문화기술대학원), 양재혁 (전기및전자공학부), 우원정 (전산학부), 이민준 (새내기과정학부), 이서영 (원자력및양자공학과), 정태승 (전기및전자공학부), 주현주 (전기및전자공학부), 황현조 (전기및전자공학부), 및 익명 작가 다수
▶ '넙죽이의 신세계 대모험' 展 유튜브 콘텐츠: https://youtu.be/Xdlz6jP33IM
2023.07.07 조회수 6773
넙죽이의 신세계 대모험 展 개최
우리 대학이 '넙죽이의 신세계 대모험' 展을 7월 한 달간 대전 신세계 아트앤사이언스 7층 대전 홍보관에서 개최한다.
KAIST 미술관(관장 석현정)은 이번 전시를 위해 우리 대학 재학생을 대상으로 지난 5월부터 약 3주간 전시회에 참여할 팬아트를 공모했다. 사진을 제외한 모든 종류의 시각 예술 장르로 공모를 진행한 결과 개인·동아리·단체 등 다양한 형태로 구성된 참가자들의 작품이 출품됐으며, 20점을 최종 선발해 꿈돌이와 함께 현재 전시되고 있다.
'넙죽이'는 2014년 만들어진 우리 대학의 캐릭터다. UI 하단의 그래픽 모티프를 활용해 푸른색 타원형 얼굴에 무표정한 눈이 드러나는 형태로 디자인됐다. 공개 당시에는 ‘여론의 수렴 없이 발표된 캐릭터’라는 비난을 받는 등 학내의 분분한 여론으로 홈페이지에서 삭제되기도 했다.
하지만, 온라인에서 학교 안팎의 누리꾼들이 원안을 활용한 다양한 디자인을 창작하며 화제를 모아 다시금 관심을 받게 됐으며, 이 과정에서 '넙죽이'라는 이름을 얻게 됐다. 기관이나 단체를 대표하는 대부분의 캐릭터는 관리자 주도로 생산 및 활용되는 반면, 우리 대학의 넙죽이는 캐릭터를 소비하는 학생들이 직접 2차 창작물을 생산하고 스토리텔링까지 성공해 활용하는 드문 사례다.
이번 콜라보 전시는 KAIST 미술관이 추진하는 '과학-예술 융·복합 창작스튜디오' 교육사업 중 하나다. 교내 학생 및 연구자들의 새로운 아이디어를 후원하고 미술관이 그 아이디어의 발생지가 될 수 있도록 구성원의 창의적인 협동작업을 지원하는 프로젝트를 추진 중이다. 이를 통해, 실험적인 아이디어를 창조력 있는 표현으로 발전시키는 동시에 작품을 관찰·토론·연구하는 교류 기회를 확대할 방침이다.
석현정 KAIST 미술관장은 "앞으로도 재학생들이 예술적인 경험을 확장할 수 있는 기회를 제공할 계획"이라며, "미술관이 문화를 소비하고 창조하는 곳이자 외부의 문화를 접하고 비교할 수 있는 곳으로 머리를 식히거나 가볍게 둘러보며 감각의 즐거움을 경험하는 공간이 되었으면 한다"라고 전했다.
한편, 넙죽이와 함께 전시된 꿈돌이는 93 대전엑스포의 공식 마스코트로 첨단 과학기술의 미래상을 표현하는 캐릭터이자 대전의 상징으로 활용되고 있다. 우리 대학 양현승 전산학부 명예교수가 개발한 지능형 이동로봇 CAIR-2는 엑스포 기간에 행사용으로 개량되어 꿈돌이와 꿈순이 캐릭터를 덧입고 방문객을 맞이하기도 했다. 이달 말일까지 열리는 '넙죽이의 신세계 대모험' 展은 누구나 무료로 관람할 수 있으며, 넙죽이를 활용한 다양한 판매 상품도 만나볼 수 있다.
▶ 참여 작가모니카 알부자(Monica Albuja, 건설및환경공학과), 김아령 (반도체시스템공학과), 김연수 (산업디자인학과), 김희진 (산업디자인학과), 박지윤 (생명과학과), 배준형 (문화기술대학원), 설예은 (생명과학과), 손소휘 (기계공학과), 송은영 (경영공학과), 신오륜 (산업디자인학과), 안치영 (문화기술대학원), 양재혁 (전기및전자공학부), 우원정 (전산학부), 이민준 (새내기과정학부), 이서영 (원자력및양자공학과), 정태승 (전기및전자공학부), 주현주 (전기및전자공학부), 황현조 (전기및전자공학부), 및 익명 작가 다수
▶ '넙죽이의 신세계 대모험' 展 유튜브 콘텐츠: https://youtu.be/Xdlz6jP33IM
2023.07.07 조회수 6773 -
 엑스선 현미경 해상도 한계 극복
엑스선 현미경은 대부분 물질을 투과하는 장점이 있어 흉부 엑스선이나 CT 촬영을 통해 신체 내부 장기와 골격을 비침습적으로 관찰할 수 있다. 최근에는 반도체, 배터리의 내부 구조를 나노스케일에서 정밀하게 관찰하기 위해 엑스선 영상 기술의 해상도를 높이려는 연구들이 활발하게 진행되고 있다.
우리 대학 물리학과 박용근 교수 연구팀이 포항가속기연구소 임준 박사 연구팀과 공동연구를 통해 기존 엑스선 현미경의 해상도 한계를 극복할 수 있는 원천 기술 개발에 성공했다고 12일(수) 밝혔다.
물리학과 이겨레 박사가 제1 저자로 참여한 이번 연구는 광학 및 광자학의 세계적인 학술지인 `라이트: 사이언스 앤 어플리케이션 (Light: Science and Application)' 4월 7일 字에 출판됐다. (논문명: Direct high-resolution X-ray imaging exploiting pseudorandomness).
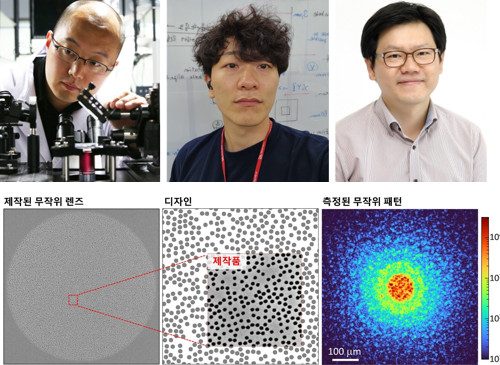
엑스선 나노 현미경은 굴절 렌즈가 없어 렌즈 대용으로 동심원 회절판(zone plate)이라 불리는 원형 모양의 격자를 사용한다. 동심원 회절판을 사용하여 얻어지는 영상의 해상도는 회절판 나노구조의 제작 품질에 의해 결정된다. 이러한 나노구조를 제작하고 유지하는 것은 여러 가지 어려움이 있으며, 이러한 한계가 엑스선 현미경의 해상도 한계를 결정했다.
연구팀은 이 문제를 극복하기 위해 새로운 엑스선 나노 현미경 기술을 개발했다. 연구팀이 제안한 엑스선 렌즈는 얇은 텅스텐 필름에 수많은 구멍을 뚫은 형태로, 입사되는 엑스선을 회절시켜 무작위적인 회절 패턴을 생성한다. 연구팀은 역설적이게도 이러한 무작위적 회절 패턴 속에 시료의 고해상도 정보가 온전히 들어있음을 수학적으로 규명하였으며, 실제 그 시료 정보를 추출하여 영상화하는데 성공하였다.
이러한 무작위 회절의 수학적 성질을 활용한 영상기법은 지난 2016년 이겨레 박사와 박용근 교수가 세계 최초로 제안하고 가시광 대역에서 구현한 기술로서, 당시 네이처 커뮤니케이션즈紙 Lee, KyeoReh, and YongKeun Park. "Exploiting the speckle-correlation scattering matrix for a compact reference-free holographic image sensor." Nature communications 7.1 (2016): 13359. 에 보고된 바 있다. 이번 연구는 해당 선행연구 결과를 엑스선 영역의 난제를 푸는 데 활용한 것이다.
구성된 시료의 영상의 해상도는 사용한 무작위 렌즈에 식각된 패턴의 크기와 직접적인 상관이 없다. 이러한 아이디어를 바탕으로 연구팀은 300 나노미터(nm) 지름의 원형 패턴으로 제작한 무작위 렌즈를 활용해 14 나노미터(nm) 해상도(대략 코로나 바이러스의 7분의 1 크기)의 영상을 취득하는 데 성공했다.
연구팀이 개발한 영상기술은 기존 동심원 회절판 제작상의 문제에 가로막혀 있던 엑스선 나노 현미경 해상도를 그 이상으로 끌어 올릴 수 있는 핵심 기반 기술이다.
제1 저자이자 공동교신저자인 우리 대학 물리학과 이겨레 박사는 “이번 연구에서는 14 나노미터(nm) 해상도에 그쳤지만, 차세대 엑스선 광원과 고성능 엑스선 검출기를 활용한다면, 기존 엑스선 나노 영상의 해상도를 넘어서 전자현미경의 해상도 수준인 1 나노미터 부근까지 근접할 수 있을 것이라 예상한다”라며“전자현미경과는 달리 엑스선은 시료를 훼손하지 않으면서 내부 구조를 관찰할 수 있으므로, 반도체 검수와 같은 비침습적 나노구조 관찰에 새로운 표준을 제시할 수 있을 것이다”라고 말했다.
공동교신저자인 포항가속기연구소 임준 박사는 “같은 맥락에서, 개발된 영상기술은 충북 오창에 신설되는 4세대 다목적방사광가속기에서 크게 성능이 증대될 수 있을 것으로 기대한다”라고 말했다.
이번 연구는 한국연구재단 리더연구사업과 세종과학펠로우십의 지원을 받아 수행됐다.
2023.04.12 조회수 7969
엑스선 현미경 해상도 한계 극복
엑스선 현미경은 대부분 물질을 투과하는 장점이 있어 흉부 엑스선이나 CT 촬영을 통해 신체 내부 장기와 골격을 비침습적으로 관찰할 수 있다. 최근에는 반도체, 배터리의 내부 구조를 나노스케일에서 정밀하게 관찰하기 위해 엑스선 영상 기술의 해상도를 높이려는 연구들이 활발하게 진행되고 있다.
우리 대학 물리학과 박용근 교수 연구팀이 포항가속기연구소 임준 박사 연구팀과 공동연구를 통해 기존 엑스선 현미경의 해상도 한계를 극복할 수 있는 원천 기술 개발에 성공했다고 12일(수) 밝혔다.
물리학과 이겨레 박사가 제1 저자로 참여한 이번 연구는 광학 및 광자학의 세계적인 학술지인 `라이트: 사이언스 앤 어플리케이션 (Light: Science and Application)' 4월 7일 字에 출판됐다. (논문명: Direct high-resolution X-ray imaging exploiting pseudorandomness).
엑스선 나노 현미경은 굴절 렌즈가 없어 렌즈 대용으로 동심원 회절판(zone plate)이라 불리는 원형 모양의 격자를 사용한다. 동심원 회절판을 사용하여 얻어지는 영상의 해상도는 회절판 나노구조의 제작 품질에 의해 결정된다. 이러한 나노구조를 제작하고 유지하는 것은 여러 가지 어려움이 있으며, 이러한 한계가 엑스선 현미경의 해상도 한계를 결정했다.
연구팀은 이 문제를 극복하기 위해 새로운 엑스선 나노 현미경 기술을 개발했다. 연구팀이 제안한 엑스선 렌즈는 얇은 텅스텐 필름에 수많은 구멍을 뚫은 형태로, 입사되는 엑스선을 회절시켜 무작위적인 회절 패턴을 생성한다. 연구팀은 역설적이게도 이러한 무작위적 회절 패턴 속에 시료의 고해상도 정보가 온전히 들어있음을 수학적으로 규명하였으며, 실제 그 시료 정보를 추출하여 영상화하는데 성공하였다.
이러한 무작위 회절의 수학적 성질을 활용한 영상기법은 지난 2016년 이겨레 박사와 박용근 교수가 세계 최초로 제안하고 가시광 대역에서 구현한 기술로서, 당시 네이처 커뮤니케이션즈紙 Lee, KyeoReh, and YongKeun Park. "Exploiting the speckle-correlation scattering matrix for a compact reference-free holographic image sensor." Nature communications 7.1 (2016): 13359. 에 보고된 바 있다. 이번 연구는 해당 선행연구 결과를 엑스선 영역의 난제를 푸는 데 활용한 것이다.
구성된 시료의 영상의 해상도는 사용한 무작위 렌즈에 식각된 패턴의 크기와 직접적인 상관이 없다. 이러한 아이디어를 바탕으로 연구팀은 300 나노미터(nm) 지름의 원형 패턴으로 제작한 무작위 렌즈를 활용해 14 나노미터(nm) 해상도(대략 코로나 바이러스의 7분의 1 크기)의 영상을 취득하는 데 성공했다.
연구팀이 개발한 영상기술은 기존 동심원 회절판 제작상의 문제에 가로막혀 있던 엑스선 나노 현미경 해상도를 그 이상으로 끌어 올릴 수 있는 핵심 기반 기술이다.
제1 저자이자 공동교신저자인 우리 대학 물리학과 이겨레 박사는 “이번 연구에서는 14 나노미터(nm) 해상도에 그쳤지만, 차세대 엑스선 광원과 고성능 엑스선 검출기를 활용한다면, 기존 엑스선 나노 영상의 해상도를 넘어서 전자현미경의 해상도 수준인 1 나노미터 부근까지 근접할 수 있을 것이라 예상한다”라며“전자현미경과는 달리 엑스선은 시료를 훼손하지 않으면서 내부 구조를 관찰할 수 있으므로, 반도체 검수와 같은 비침습적 나노구조 관찰에 새로운 표준을 제시할 수 있을 것이다”라고 말했다.
공동교신저자인 포항가속기연구소 임준 박사는 “같은 맥락에서, 개발된 영상기술은 충북 오창에 신설되는 4세대 다목적방사광가속기에서 크게 성능이 증대될 수 있을 것으로 기대한다”라고 말했다.
이번 연구는 한국연구재단 리더연구사업과 세종과학펠로우십의 지원을 받아 수행됐다.
2023.04.12 조회수 7969 -
 ‘라이보’ 로봇, 해변을 거침없이 달리다
우리 대학 기계공학과 황보제민 교수 연구팀이 모래와 같이 변형하는 지형에서도 민첩하고 견고하게 보행할 수 있는 사족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래와 같은 입상 물질로 이루어진 지반에서 로봇 보행체가 받는 힘을 모델링하고, 이를 사족 로봇에 시뮬레이션하는 기술을 개발했다. 또한, 사전 정보 없이도 다양한 지반 종류에 스스로 적응해가며 보행하기에 적합한 인공신경망 구조를 도입해 강화학습에 적용했다. 학습된 신경망 제어기는 해변 모래사장에서의 고속 이동과 에어 매트리스 위에서의 회전을 선보이는 등 변화하는 지형에서의 견고성을 입증해 사족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
기계공학과 최수영 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다. (논문명 : Learning quadrupedal locomotion on deformable terrain)
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과들의 데이터를 수집하고 이를 사용해 임무를 수행하는 기계를 만드는 학습 방법이다. 이때 필요한 데이터의 양이 많아 실제 환경의 물리 현상을 근사하는 시뮬레이션으로 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기들은 시뮬레이션에서 수집한 데이터를 통해서 학습된 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 성공적으로 수행해 온 바 있다.
다만 학습한 시뮬레이션 환경과 실제 마주친 환경이 다른 경우 학습 기반 제어기의 성능은 급격히 감소하기 때문에, 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다. 따라서, 변형하는 지형을 극복하는 학습 기반 제어기를 만들기 위해서는 시뮬레이터는 유사한 접촉 경험을 제공해야 한다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 지반 반력 모델을 기반으로 보행체의 운동 역학으로부터 접촉에서 발생하는 힘을 예측하는 접촉 모델을 정의했다.
나아가 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 풀이함으로써 효율적으로 변형하는 지형을 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 나오는 시계열 데이터를 분석하는 순환 신경망을 사용함으로써 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 `라이보'에 탑재돼 로봇의 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 3.03 m/s의 고속 보행을 선보였으며, 추가 작업 없이 풀밭, 육상 트랙, 단단한 땅에 적용됐을 때도 지반 특성에 적응해 안정하게 주행할 수 있었다.
또한, 에어 매트리스에서 1.54 rad/s(초당 약 90°)의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀은 지면을 강체로 간주한 제어기와의 비교를 통해 학습 간 적합한 접촉 경험을 제공하는 것의 중요성을 드러냈으며, 제안한 순환 신경망이 지반 성질에 따라 제어기의 보행 방식을 수정한다는 것을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 다양한 보행 로봇이 극복할 수 있는 지형의 범위를 넓힘으로써 로봇이 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다.
제1 저자인 최수영 박사과정은 "학습 기반 제어기에 실제의 변형하는 지반과 가까운 접촉 경험을 제공하는 것이 변형하는 지형에 적용하는 데 필수적이라는 것을 보였다ˮ 라며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어 다양한 로봇 보행 연구에 접목될 수 있다ˮ 라고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
2023.01.26 조회수 9262
‘라이보’ 로봇, 해변을 거침없이 달리다
우리 대학 기계공학과 황보제민 교수 연구팀이 모래와 같이 변형하는 지형에서도 민첩하고 견고하게 보행할 수 있는 사족 로봇 제어기술을 개발했다고 26일 밝혔다.
황보 교수 연구팀은 모래와 같은 입상 물질로 이루어진 지반에서 로봇 보행체가 받는 힘을 모델링하고, 이를 사족 로봇에 시뮬레이션하는 기술을 개발했다. 또한, 사전 정보 없이도 다양한 지반 종류에 스스로 적응해가며 보행하기에 적합한 인공신경망 구조를 도입해 강화학습에 적용했다. 학습된 신경망 제어기는 해변 모래사장에서의 고속 이동과 에어 매트리스 위에서의 회전을 선보이는 등 변화하는 지형에서의 견고성을 입증해 사족 보행 로봇이 적용될 수 있는 영역을 넓힐 것으로 기대된다.
기계공학과 최수영 박사과정이 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 1월 8권 74호에 출판됐다. (논문명 : Learning quadrupedal locomotion on deformable terrain)
강화학습은 임의의 상황에서 여러 행동이 초래하는 결과들의 데이터를 수집하고 이를 사용해 임무를 수행하는 기계를 만드는 학습 방법이다. 이때 필요한 데이터의 양이 많아 실제 환경의 물리 현상을 근사하는 시뮬레이션으로 빠르게 데이터를 모으는 방법이 널리 사용되고 있다.
특히 보행 로봇 분야에서 학습 기반 제어기들은 시뮬레이션에서 수집한 데이터를 통해서 학습된 이후 실제 환경에 적용돼 다양한 지형에서 보행 제어를 성공적으로 수행해 온 바 있다.
다만 학습한 시뮬레이션 환경과 실제 마주친 환경이 다른 경우 학습 기반 제어기의 성능은 급격히 감소하기 때문에, 데이터 수집 단계에서 실제와 유사한 환경을 구현하는 것이 중요하다. 따라서, 변형하는 지형을 극복하는 학습 기반 제어기를 만들기 위해서는 시뮬레이터는 유사한 접촉 경험을 제공해야 한다.
연구팀은 기존 연구에서 밝혀진 입상 매체의 추가 질량 효과를 고려하는 지반 반력 모델을 기반으로 보행체의 운동 역학으로부터 접촉에서 발생하는 힘을 예측하는 접촉 모델을 정의했다.
나아가 시간 단계마다 하나 혹은 여러 개의 접촉에서 발생하는 힘을 풀이함으로써 효율적으로 변형하는 지형을 시뮬레이션했다.
연구팀은 또한 로봇의 센서에서 나오는 시계열 데이터를 분석하는 순환 신경망을 사용함으로써 암시적으로 지반 특성을 예측하는 인공신경망 구조를 도입했다.
학습이 완료된 제어기는 연구팀이 직접 제작한 로봇 `라이보'에 탑재돼 로봇의 발이 완전히 모래에 잠기는 해변 모래사장에서 최대 3.03 m/s의 고속 보행을 선보였으며, 추가 작업 없이 풀밭, 육상 트랙, 단단한 땅에 적용됐을 때도 지반 특성에 적응해 안정하게 주행할 수 있었다.
또한, 에어 매트리스에서 1.54 rad/s(초당 약 90°)의 회전을 안정적으로 수행했으며 갑작스럽게 지형이 부드러워지는 환경도 극복하며 빠른 적응력을 입증했다.
연구팀은 지면을 강체로 간주한 제어기와의 비교를 통해 학습 간 적합한 접촉 경험을 제공하는 것의 중요성을 드러냈으며, 제안한 순환 신경망이 지반 성질에 따라 제어기의 보행 방식을 수정한다는 것을 입증했다.
연구팀이 개발한 시뮬레이션과 학습 방법론은 다양한 보행 로봇이 극복할 수 있는 지형의 범위를 넓힘으로써 로봇이 실제적 임무를 수행하는 데에 이바지할 수 있을 것으로 기대된다.
제1 저자인 최수영 박사과정은 "학습 기반 제어기에 실제의 변형하는 지반과 가까운 접촉 경험을 제공하는 것이 변형하는 지형에 적용하는 데 필수적이라는 것을 보였다ˮ 라며 "제시된 제어기는 지형에 대한 사전 정보 없이 기용될 수 있어 다양한 로봇 보행 연구에 접목될 수 있다ˮ 라고 말했다.
한편 이번 연구는 삼성전자 미래기술육성센터의 지원을 받아 수행됐다.
2023.01.26 조회수 9262 -
 세계 최고 빠른 속도로 철제 벽면과 천장을 보행하는 사족 로봇 개발
우리 대학 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다. (논문명 : Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot)
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 *535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8킬로그램(kg)의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
*535N을 kg으로 환산하면 54.5kg, 445N을 kg으로 환산하면 45.4kg이다. 즉, 수직 방향으로 최대 54.5kg, 수평 방향으로는 최대 45.4kg 정도의 외력이 가해져도 (혹은 이에 해당하는 무게 추가 매달려도) 발바닥이 철판에서 떨어지지 않는다.
연구팀이 제작한 사족 보행 로봇은 초속 70센티미터(cm)의 속도로 직벽을 고속 등반하였고, 최대 초속 50센티미터(cm)의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35센티미터(cm)의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5센티미터(cm) 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 "영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다ˮ라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
2022.12.26 조회수 10192
세계 최고 빠른 속도로 철제 벽면과 천장을 보행하는 사족 로봇 개발
우리 대학 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다. (논문명 : Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot)
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 *535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8킬로그램(kg)의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
*535N을 kg으로 환산하면 54.5kg, 445N을 kg으로 환산하면 45.4kg이다. 즉, 수직 방향으로 최대 54.5kg, 수평 방향으로는 최대 45.4kg 정도의 외력이 가해져도 (혹은 이에 해당하는 무게 추가 매달려도) 발바닥이 철판에서 떨어지지 않는다.
연구팀이 제작한 사족 보행 로봇은 초속 70센티미터(cm)의 속도로 직벽을 고속 등반하였고, 최대 초속 50센티미터(cm)의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35센티미터(cm)의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5센티미터(cm) 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 "영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다ˮ라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
2022.12.26 조회수 10192 -
 2022 글로벌 스타트업 인턴십 박람회 개최
우리 대학 국제협력처 글로벌사업기획센터가 11월 30일(수)부터 이틀간 '2022 글로벌스타트업 인턴십 박람회(Global Startup Internship Fair: GSIF)'를 개최했다.
'2022 KAIST GSIF' 박람회는 미국 스타트업과 연계된 인턴십 박람회다. 양자 분야 유니콘 기업인 싸이퀀텀(PsiQuantum)을 포함해 임프리메드(Imprimed), 베슬 에이아이(Vessl AI), 진에딧(Genedit), 메딕 라이프사이언스(Medic Life Sciences), 브링코(Bringko) 등 동문 기업이 참여했다. 또한, 몰로코(Moloco), 브레이브 터틀(Brave Turtles), 네오집(Neozips), 루크몬(Luckmon), 큐픽스(CUPIX) 등의 기업들도 함께 참여했다. 인공지능(AI), 바이오, 양자, 물류, 게임, 광고, 부동산, 이커머스 (e-commerce) 등 다양한 분야에서 활약하는 11개 스타트업이 초청되었으며, 100여명 의 KAIST 학생이 사전 신청을 통해 행사에 참여했다.
이번 박람회에서는 참여 기업들이 사전 신청한 우리 대학 재학생을 대상으로 회사 소개 및 채용·진로 상담을 진행했다. 연사로 초청된 임성원 임프리메드 대표는 "모교 후배 학생들에게 미국에서 스타트업을 개척하고 운영하면서 깨달았던 많은 경험을 공유하고 그 경험을 토대로 운영 중인 회사를 소개할 수 있게 되어 매우 뜻깊다"고 참여 소감을 밝혔다.
이번 박람회에서는 미국 인턴십을 준비하는 학생들을 위해 미국 인턴십 지원 이력서 및 이메일 작성법, 실리콘밸리 정착 및 인턴십 체험 관련 세션과 함께 J1 비자 설명회도 진행됐다.임만성 국제협력처장은 "미국 스타트업에서의 인턴십을 통해 글로벌 기업가로 성장하고자 하는 학생들이 점점 많아지고 있다"라고 강조하며, "이번 박람회는 KAIST 학생들이 글로벌 무대에서 활약하고 있는 기업가들을 만나 글로벌 시장에서 경쟁력을 갖춘 예비 창업가로 성장하는 기회가 될 것"이라고 말했다.
▶문의: 글로벌사업기획센터 이수아 연구조교수 (slee900@kaist.ac.kr) / 김예선 행정원 (yeseon@kaist.ac.kr)
2022.12.01 조회수 8116
2022 글로벌 스타트업 인턴십 박람회 개최
우리 대학 국제협력처 글로벌사업기획센터가 11월 30일(수)부터 이틀간 '2022 글로벌스타트업 인턴십 박람회(Global Startup Internship Fair: GSIF)'를 개최했다.
'2022 KAIST GSIF' 박람회는 미국 스타트업과 연계된 인턴십 박람회다. 양자 분야 유니콘 기업인 싸이퀀텀(PsiQuantum)을 포함해 임프리메드(Imprimed), 베슬 에이아이(Vessl AI), 진에딧(Genedit), 메딕 라이프사이언스(Medic Life Sciences), 브링코(Bringko) 등 동문 기업이 참여했다. 또한, 몰로코(Moloco), 브레이브 터틀(Brave Turtles), 네오집(Neozips), 루크몬(Luckmon), 큐픽스(CUPIX) 등의 기업들도 함께 참여했다. 인공지능(AI), 바이오, 양자, 물류, 게임, 광고, 부동산, 이커머스 (e-commerce) 등 다양한 분야에서 활약하는 11개 스타트업이 초청되었으며, 100여명 의 KAIST 학생이 사전 신청을 통해 행사에 참여했다.
이번 박람회에서는 참여 기업들이 사전 신청한 우리 대학 재학생을 대상으로 회사 소개 및 채용·진로 상담을 진행했다. 연사로 초청된 임성원 임프리메드 대표는 "모교 후배 학생들에게 미국에서 스타트업을 개척하고 운영하면서 깨달았던 많은 경험을 공유하고 그 경험을 토대로 운영 중인 회사를 소개할 수 있게 되어 매우 뜻깊다"고 참여 소감을 밝혔다.
이번 박람회에서는 미국 인턴십을 준비하는 학생들을 위해 미국 인턴십 지원 이력서 및 이메일 작성법, 실리콘밸리 정착 및 인턴십 체험 관련 세션과 함께 J1 비자 설명회도 진행됐다.임만성 국제협력처장은 "미국 스타트업에서의 인턴십을 통해 글로벌 기업가로 성장하고자 하는 학생들이 점점 많아지고 있다"라고 강조하며, "이번 박람회는 KAIST 학생들이 글로벌 무대에서 활약하고 있는 기업가들을 만나 글로벌 시장에서 경쟁력을 갖춘 예비 창업가로 성장하는 기회가 될 것"이라고 말했다.
▶문의: 글로벌사업기획센터 이수아 연구조교수 (slee900@kaist.ac.kr) / 김예선 행정원 (yeseon@kaist.ac.kr)
2022.12.01 조회수 8116 -
 KAIST-화성시 사이언스 허브 개소
우리 대학이 'KAIST-화성시 사이언스 허브' 개소식을 25일 개최했다.
롯데백화점이 화성시에 공공기여로 제공한 동탄점 지하 3층 1,870㎡의 공간에 조성된 'KAIST-화성시 사이언스 허브'에는 22개의 중소기업과 24개의 1인기업이 입주할 수 있는 공유 오피스가 마련됐다.
향후, 입주기업에는 KAIST의 기술 자문은 물론 KAIST 홀딩스, KAIST 청년창업지주, K-벤처스 등을 연계한 컨설팅과 투자 자문도 제공할 예정이다.
또한, 대중들을 위한 강연장과 시민들이 쉴 수 있는 카페로 구성된 공용라운지도 함께 들어섰다. KAIST 교수진의 기술 동향 강연을 비롯해 시민을 위한 다채로운 과학 강연 등을 진행할 예정이다.
이날 개소식에는 이광형 KAIST 총장, 정명근 화성시장, 이원욱 국회의원, 이종성 롯데백화점 동탄점장, 스타트업 지원 관계자, 화성시 기업 대표 등 약 100여 명이 참석했다.
KAIST와 화성시 협력을 처음 제안한 이원욱 의원은 "사이언스 허브는 지자체와 기업, 교육기관이 함께하는 산학협력의 새로운 모델을 제시하는 것은 물론 반도체 산업 중심의 지역 경제 활성화와 KAIST를 통한 교육 경쟁력 향상에도 이바지할 것으로 기대한다"라고 말했다.
정명근 화성시장은 "KAIST, 롯데백화점과 함께하는 사이언스 허브가 새로운 산·학·관 협력 모델이 되도록 최선의 노력을 다할 것"이라고 약속했다. 이광형 KAIST 총장은 "사이언스 허브는 IDEC을 통한 반도체 인재 양성, 공유 오피스를 거점 삼은 스타트업의 육성, 시민과 함께하는 과학기술 대중화가 한데 어우러지는 산·학·관 동반성장의 본보기가 될 것"이라고 강조했다.
2022.11.28 조회수 4443
KAIST-화성시 사이언스 허브 개소
우리 대학이 'KAIST-화성시 사이언스 허브' 개소식을 25일 개최했다.
롯데백화점이 화성시에 공공기여로 제공한 동탄점 지하 3층 1,870㎡의 공간에 조성된 'KAIST-화성시 사이언스 허브'에는 22개의 중소기업과 24개의 1인기업이 입주할 수 있는 공유 오피스가 마련됐다.
향후, 입주기업에는 KAIST의 기술 자문은 물론 KAIST 홀딩스, KAIST 청년창업지주, K-벤처스 등을 연계한 컨설팅과 투자 자문도 제공할 예정이다.
또한, 대중들을 위한 강연장과 시민들이 쉴 수 있는 카페로 구성된 공용라운지도 함께 들어섰다. KAIST 교수진의 기술 동향 강연을 비롯해 시민을 위한 다채로운 과학 강연 등을 진행할 예정이다.
이날 개소식에는 이광형 KAIST 총장, 정명근 화성시장, 이원욱 국회의원, 이종성 롯데백화점 동탄점장, 스타트업 지원 관계자, 화성시 기업 대표 등 약 100여 명이 참석했다.
KAIST와 화성시 협력을 처음 제안한 이원욱 의원은 "사이언스 허브는 지자체와 기업, 교육기관이 함께하는 산학협력의 새로운 모델을 제시하는 것은 물론 반도체 산업 중심의 지역 경제 활성화와 KAIST를 통한 교육 경쟁력 향상에도 이바지할 것으로 기대한다"라고 말했다.
정명근 화성시장은 "KAIST, 롯데백화점과 함께하는 사이언스 허브가 새로운 산·학·관 협력 모델이 되도록 최선의 노력을 다할 것"이라고 약속했다. 이광형 KAIST 총장은 "사이언스 허브는 IDEC을 통한 반도체 인재 양성, 공유 오피스를 거점 삼은 스타트업의 육성, 시민과 함께하는 과학기술 대중화가 한데 어우러지는 산·학·관 동반성장의 본보기가 될 것"이라고 강조했다.
2022.11.28 조회수 4443