%ED%9C%B4%EB%A8%B8%EB%85%B8%EC%9D%B4%EB%93%9C
-
 제3회 한국인공지능시스템포럼 조찬 강연회, 인간과 로봇의 공존을 논하다.
우리 대학 인공지능반도체대학원은 27일(화) 오전 대전 오노마 호텔에서 ‘제3회 한국인공지능시스템포럼(KAISF)’ 조찬 강연회를 성공적으로 개최하였다.
이번 강연회는 ‘휴머노이드 로봇의 혁명: 인간과 로봇의 공존 시대’를 주제로, 인공지능(AI)과 로봇 기술의 융합이라는 최신 이슈에 대한 깊이 있는 통찰을 제공하는 자리로 마련되었다.
총 60명의 산학 전문가가 참석한 가운데, LG전자 백승민 소장의 초청 강연은 현장 참석자들의 높은 관심과 호응을 이끌어냈다.
백승민 LG전자 소장은 이날 강연에서 AI 기술을 활용한 생활형 로봇의 진화, 생성형 AI를 접목한 자율지능 향상 사례, 그리고 로봇 플랫폼의 통합 가속화 전략 등을 중심으로 발표했다. 특히 인간과 자연스럽게 상호작용하는 휴머노이드 로봇의 서비스화 실증사례는 산업계 리더들에게 실질적인 인사이트를 제공하였다.
이어 “AI 기술은 이제 실제 로봇의 형태로 현실 공간 속에 들어오고 있으며, 사람과 공존 가능한 방향으로 급속히 진화하고 있다”며, “LG전자는 생성형 AI, 로봇 OS, AI 반도체 등 최신 기술을 결합해 실용적이고 지속 가능한 로봇 플랫폼 구축에 박차를 가하고 있으며 대전의 대학과 연구소 및 회사들과 적극 협력하겠다”고 밝혔다.
이번 강연회에서는 AI와 로봇의 융합을 넘어서, 최근 빠르게 부상 중인 AI-X와 Physical AI의 비전, 그리고 알고리즘 + AI 반도체 + 시스템 통합형 AI 연구의 전략적 방향성에 대한 논의도 활발히 이어졌다.
특히 온디바이스 AI, 초저전력 추론, AI 로봇 내장 SoC, 그리고 멀티모달 VLA (Video-Language-Action) 통합 처리 플랫폼등, 차세대 로봇 지능 구현을 위한 하드웨어·소프트웨어 통합 설계 전략의 필요성이 강조되었다.
홍진배 정보통신기획평가원 원장은 “피지컬 AI가 산업 질서를 바꾸는 지금이 인공지능과 미래를 설계할 전환점”이라며, “AI 인프라, 융합 서비스, 인재 양성, 기술사업화는 물론 AI 모델·반도체·피지컬 AI 등 핵심 기술 확보를 위한 로드맵을 마련해 AI 강국 도약을 지원하겠다”고 밝혔다.
한국인공지능시스템포럼 유회준 의장(KAIST 교수)은 “AI 기술의 발전 속도가 그 어느 때보다 빠른 지금, 단순한 알고리즘 경쟁을 넘어선 시스템 통합적 사고와 기술 융합이 절실한 시점”이라며,“KAISF가 단순한 정보 교류를 넘어, 알고리즘, AI반도체 및 시스템의 전분야에서 실제 산업계와 학계의 공동연구와 생태계 연결을 촉진하는 플랫폼이 되기를 바란다”고 밝혔다.
한국인공지능시스템포럼(KAISF)는 AI-X 시대를 대비해 인공지능, 시스템 반도체, 로보틱스 융합을 중심으로 전략적 비전, Physical AI의 실증 기반 확산, 통합 플랫폼 연구를 지속할 예정이다. KAISF는 AI 기술을 실제 세계로 연결하는 다리이자, 한국형 AI 생태계의 전략적 허브로 자리매김하는 것을 목표로 하고 있다.
2025.05.27 조회수 929
제3회 한국인공지능시스템포럼 조찬 강연회, 인간과 로봇의 공존을 논하다.
우리 대학 인공지능반도체대학원은 27일(화) 오전 대전 오노마 호텔에서 ‘제3회 한국인공지능시스템포럼(KAISF)’ 조찬 강연회를 성공적으로 개최하였다.
이번 강연회는 ‘휴머노이드 로봇의 혁명: 인간과 로봇의 공존 시대’를 주제로, 인공지능(AI)과 로봇 기술의 융합이라는 최신 이슈에 대한 깊이 있는 통찰을 제공하는 자리로 마련되었다.
총 60명의 산학 전문가가 참석한 가운데, LG전자 백승민 소장의 초청 강연은 현장 참석자들의 높은 관심과 호응을 이끌어냈다.
백승민 LG전자 소장은 이날 강연에서 AI 기술을 활용한 생활형 로봇의 진화, 생성형 AI를 접목한 자율지능 향상 사례, 그리고 로봇 플랫폼의 통합 가속화 전략 등을 중심으로 발표했다. 특히 인간과 자연스럽게 상호작용하는 휴머노이드 로봇의 서비스화 실증사례는 산업계 리더들에게 실질적인 인사이트를 제공하였다.
이어 “AI 기술은 이제 실제 로봇의 형태로 현실 공간 속에 들어오고 있으며, 사람과 공존 가능한 방향으로 급속히 진화하고 있다”며, “LG전자는 생성형 AI, 로봇 OS, AI 반도체 등 최신 기술을 결합해 실용적이고 지속 가능한 로봇 플랫폼 구축에 박차를 가하고 있으며 대전의 대학과 연구소 및 회사들과 적극 협력하겠다”고 밝혔다.
이번 강연회에서는 AI와 로봇의 융합을 넘어서, 최근 빠르게 부상 중인 AI-X와 Physical AI의 비전, 그리고 알고리즘 + AI 반도체 + 시스템 통합형 AI 연구의 전략적 방향성에 대한 논의도 활발히 이어졌다.
특히 온디바이스 AI, 초저전력 추론, AI 로봇 내장 SoC, 그리고 멀티모달 VLA (Video-Language-Action) 통합 처리 플랫폼등, 차세대 로봇 지능 구현을 위한 하드웨어·소프트웨어 통합 설계 전략의 필요성이 강조되었다.
홍진배 정보통신기획평가원 원장은 “피지컬 AI가 산업 질서를 바꾸는 지금이 인공지능과 미래를 설계할 전환점”이라며, “AI 인프라, 융합 서비스, 인재 양성, 기술사업화는 물론 AI 모델·반도체·피지컬 AI 등 핵심 기술 확보를 위한 로드맵을 마련해 AI 강국 도약을 지원하겠다”고 밝혔다.
한국인공지능시스템포럼 유회준 의장(KAIST 교수)은 “AI 기술의 발전 속도가 그 어느 때보다 빠른 지금, 단순한 알고리즘 경쟁을 넘어선 시스템 통합적 사고와 기술 융합이 절실한 시점”이라며,“KAISF가 단순한 정보 교류를 넘어, 알고리즘, AI반도체 및 시스템의 전분야에서 실제 산업계와 학계의 공동연구와 생태계 연결을 촉진하는 플랫폼이 되기를 바란다”고 밝혔다.
한국인공지능시스템포럼(KAISF)는 AI-X 시대를 대비해 인공지능, 시스템 반도체, 로보틱스 융합을 중심으로 전략적 비전, Physical AI의 실증 기반 확산, 통합 플랫폼 연구를 지속할 예정이다. KAISF는 AI 기술을 실제 세계로 연결하는 다리이자, 한국형 AI 생태계의 전략적 허브로 자리매김하는 것을 목표로 하고 있다.
2025.05.27 조회수 929 -
 문일철 교수팀, 북경대와 영국 ICL 제치고 ICML 2024 챌린지 우승
우리 대학 산업및시스템공학과 문일철 교수 연구팀이 세계 최고 수준의 기계학습 학회인 ‘국제머신러닝학회(ICML, International Conference on Machine Learning) 2024’에서 개최된 ‘멀티모달 작업계획 생성 경진대회(EgoPlan)’에서 다수의 세계 연구팀을 모두 제치고 1위로 우승을 했다고 30일 밝혔다.
본 대회는 7월 21일부터 27일까지 오스트리아 비엔나에서 개최됐으며, 참가자는 북경대(中), 북경 AGI연구소(中) 및 임페리얼칼리지 런던(Imperial College London, 英) 등의 6개국 13개 기관이 참여해 경쟁했다. 우리 연구팀은 국내 유일의 참가 기관으로 7월 26일 우승상 및 혁신상을 수상했다.
이번 대회는 인공지능이 주방에서 요리하는 과정을 비디오 및 지문으로 학습한 이후, 경험하지 못한 요리 과정에서 상식적으로 합당한 의사결정을 내려 조리할 수 있는지를 경쟁하는 시합이었다. 이는 시각 정보와 지문 정보 등의 멀티모달 정보를 조합하며, 학습에 반영되지 않은 상식까지 반영해 의사결정을 내리는 시험이다. 이 기술은 최소한의 학습만으로도 로봇이 다양한 멀티모달 정보 및 기초 상식을 활용해 자율 제조 및 서비스를 수행할 수 있도록 개발하는 것이 핵심이다.
산업및시스템공학과 이광현(석사과정), 강미나(석사과정) 등 총 11명의 팀으로 참가한 응용인공지능 연구실(이하 AAILab) 팀은 상식 기반 추론을 통한 작업계획 생성의 정확도 1위 성능으로 우승상(Outstanding Champion Award) 및 기술의 우수성을 인정받아 혁신상(Innovation Award)을 수상해, 2개 상을 동시에 수상했다. 이번 대회를 위해 AAILab 팀은 멀티모달 대규모 모델의 파인튜닝 학습에 대한 연구 개발 결과를 적용해 우승을 차지했다.
문일철 교수는 “중국팀들이 대회를 위해 위챗(WeChat) 대화방까지 마련해 서로 협력한다는 얘기를 전해 듣고는 경쟁이 치열하다고 느꼈다. 하지만 KAIST 팀도 각고의 노력으로 우승할 수 있었다. 학생들이 두 달 동안 거의 잠을 자지 못했다”고 우승 소회를 밝혔다. 그리고 문 교수는 “이번 대회의 출제 문제는 요리하는 인공지능이지만, 사실 테슬라에서 시험하고 있는 휴머노이드 제조 로봇에 활용될 수 있는 상식을 가진 인공지능을 만드는 기술이 본질이다. 많은 중국 참가자가 보여주듯이 중국의 로봇 및 인공지능 기술 선점 노력을 엿볼 수 있다”라고 분석했다.
이번 연구는 정보통신기획평가원(IITP)에서 지원한 사람중심인공지능 핵심원천기술개발사업 중 ‘이종데이터기반 상식 추출, 이해, 추론을 위한 인공지능 기술개발(연구책임자 문일철)’을 통해 이뤄졌다.
2024.07.30 조회수 5798
문일철 교수팀, 북경대와 영국 ICL 제치고 ICML 2024 챌린지 우승
우리 대학 산업및시스템공학과 문일철 교수 연구팀이 세계 최고 수준의 기계학습 학회인 ‘국제머신러닝학회(ICML, International Conference on Machine Learning) 2024’에서 개최된 ‘멀티모달 작업계획 생성 경진대회(EgoPlan)’에서 다수의 세계 연구팀을 모두 제치고 1위로 우승을 했다고 30일 밝혔다.
본 대회는 7월 21일부터 27일까지 오스트리아 비엔나에서 개최됐으며, 참가자는 북경대(中), 북경 AGI연구소(中) 및 임페리얼칼리지 런던(Imperial College London, 英) 등의 6개국 13개 기관이 참여해 경쟁했다. 우리 연구팀은 국내 유일의 참가 기관으로 7월 26일 우승상 및 혁신상을 수상했다.
이번 대회는 인공지능이 주방에서 요리하는 과정을 비디오 및 지문으로 학습한 이후, 경험하지 못한 요리 과정에서 상식적으로 합당한 의사결정을 내려 조리할 수 있는지를 경쟁하는 시합이었다. 이는 시각 정보와 지문 정보 등의 멀티모달 정보를 조합하며, 학습에 반영되지 않은 상식까지 반영해 의사결정을 내리는 시험이다. 이 기술은 최소한의 학습만으로도 로봇이 다양한 멀티모달 정보 및 기초 상식을 활용해 자율 제조 및 서비스를 수행할 수 있도록 개발하는 것이 핵심이다.
산업및시스템공학과 이광현(석사과정), 강미나(석사과정) 등 총 11명의 팀으로 참가한 응용인공지능 연구실(이하 AAILab) 팀은 상식 기반 추론을 통한 작업계획 생성의 정확도 1위 성능으로 우승상(Outstanding Champion Award) 및 기술의 우수성을 인정받아 혁신상(Innovation Award)을 수상해, 2개 상을 동시에 수상했다. 이번 대회를 위해 AAILab 팀은 멀티모달 대규모 모델의 파인튜닝 학습에 대한 연구 개발 결과를 적용해 우승을 차지했다.
문일철 교수는 “중국팀들이 대회를 위해 위챗(WeChat) 대화방까지 마련해 서로 협력한다는 얘기를 전해 듣고는 경쟁이 치열하다고 느꼈다. 하지만 KAIST 팀도 각고의 노력으로 우승할 수 있었다. 학생들이 두 달 동안 거의 잠을 자지 못했다”고 우승 소회를 밝혔다. 그리고 문 교수는 “이번 대회의 출제 문제는 요리하는 인공지능이지만, 사실 테슬라에서 시험하고 있는 휴머노이드 제조 로봇에 활용될 수 있는 상식을 가진 인공지능을 만드는 기술이 본질이다. 많은 중국 참가자가 보여주듯이 중국의 로봇 및 인공지능 기술 선점 노력을 엿볼 수 있다”라고 분석했다.
이번 연구는 정보통신기획평가원(IITP)에서 지원한 사람중심인공지능 핵심원천기술개발사업 중 ‘이종데이터기반 상식 추출, 이해, 추론을 위한 인공지능 기술개발(연구책임자 문일철)’을 통해 이뤄졌다.
2024.07.30 조회수 5798 -
 세계 최초 휴머노이드 파일럿 ‘파이봇’ 개발
최근 영화 탑건 매버릭에서 전설적인 파일럿 매버릭의 비행을 보았다면 KAIST에서는 휴머노이드 파일럿 ‘파이봇(Pibot)’이 등장하여 화제다.
우리 대학은 자연어로 기술된 매뉴얼을 이해하고 이를 기반으로 비행기를 직접 조종이 가능한 인간형 로봇을 개발, 이를 실용화할 계획이라고 19일 밝혔다.
연구책임자인 전기및전자공학부 심현철 교수와 김재철AI대학원 주재걸, 기계공학과 윤국진, 전기및전자공학부 김민준 교수가 참여한 공동연구팀은 일반적인 언어로 작성된 조종 매뉴얼을 읽고 이해하는 ‘자연어 처리기반 인간형 조종사 로봇 개발’ 미래도전과제의 지원을 기반으로 인공지능과 로보틱스 기술을 적용해 인간형 로봇이 실제 항공기 조종석에 착석해서 기존 항공기를 전혀 개조하지 않고 착석한 다음, 조종석의 다양한 장치들을 직접 조작해 비행하는 방식을 선보였다. 기존 항공기의 자동비행장치(오토파일럿)이나 무인 비행만 가능한 무인항공기와는 근본적인 차이가 있다.
관련 연구진이 개발 중인 조종사 로봇은 인간 조종사에게는 불가능한 전 세계 항공차트(Jeppson Chart)를 전부 기억하여 실수 없는 조종이 가능하며, 특히 최근 큰 이슈가 된 ChatGPT 기술을 활용하여 항공기 조작 매뉴얼 및 비상 대처절차를 담은 자료(QRH)를 기억, 즉각적으로 대응할 수 있고 항공기의 비행 상태를 기반으로 실시간으로 안전한 경로를 계산할 수 있어 인간 조종사보다 훨씬 빠르게 비상 상황에 대처하는 것이 가능하다.
또한 기존 로봇이 고정된 위치에서 반복적인 작업만 가능한 것에 비해 조종사 로봇은 장착된 카메라로 조종석 내부 및 항공기 외부 상황을 파악하고 조종간의 각종 스위치들을 정확하게 조작하는 것이 가능하며, 고정밀 강인 제어 기술을 적용해 진동이 심한 항공기 내부에서 정확한 로봇 팔 및 손 제어가 가능하다.
조종사 로봇은 현재 비행 조종 시뮬레이터에서 항공기의 시동부터 택싱, 이착륙, 순항, 주기 등 모든 조작을 수행하고 있으며, 연구팀은 조종사 로봇을 실제 경비행기에 적용해 항공기를 직접 조종하여 검증할 계획이다. 본 과제의 책임자인 심현철 교수는 “인간형 조종사 로봇은 기존의 항공기들을 전혀 개조하지 않고 즉각적으로 자동 비행이 가능해 실용성 및 활용성이 매우 높으며, 항공기뿐만 아니라 자동차, 장갑차 등 다양한 장치의 조작도 가능해 병력자원 고갈이 심각한 현 상황에 매우 유용하게 적용될 수 있을 것으로 기대한다”고 말했다.
한편, 동 연구과제는 국방과학연구소의 미래도전과제(총 57억원)를 지원받아 심현철 교수(연구책임자), 주재걸 교수, 윤국진 교수, 김민준 교수의 협업으로 2022년부터 개발이 진행되고 있고 개발 완성 시점은 2026년이며 민간 및 군용 활용을 목적으로 사업화 방안도 모색중이다.
2023.07.19 조회수 9987
세계 최초 휴머노이드 파일럿 ‘파이봇’ 개발
최근 영화 탑건 매버릭에서 전설적인 파일럿 매버릭의 비행을 보았다면 KAIST에서는 휴머노이드 파일럿 ‘파이봇(Pibot)’이 등장하여 화제다.
우리 대학은 자연어로 기술된 매뉴얼을 이해하고 이를 기반으로 비행기를 직접 조종이 가능한 인간형 로봇을 개발, 이를 실용화할 계획이라고 19일 밝혔다.
연구책임자인 전기및전자공학부 심현철 교수와 김재철AI대학원 주재걸, 기계공학과 윤국진, 전기및전자공학부 김민준 교수가 참여한 공동연구팀은 일반적인 언어로 작성된 조종 매뉴얼을 읽고 이해하는 ‘자연어 처리기반 인간형 조종사 로봇 개발’ 미래도전과제의 지원을 기반으로 인공지능과 로보틱스 기술을 적용해 인간형 로봇이 실제 항공기 조종석에 착석해서 기존 항공기를 전혀 개조하지 않고 착석한 다음, 조종석의 다양한 장치들을 직접 조작해 비행하는 방식을 선보였다. 기존 항공기의 자동비행장치(오토파일럿)이나 무인 비행만 가능한 무인항공기와는 근본적인 차이가 있다.
관련 연구진이 개발 중인 조종사 로봇은 인간 조종사에게는 불가능한 전 세계 항공차트(Jeppson Chart)를 전부 기억하여 실수 없는 조종이 가능하며, 특히 최근 큰 이슈가 된 ChatGPT 기술을 활용하여 항공기 조작 매뉴얼 및 비상 대처절차를 담은 자료(QRH)를 기억, 즉각적으로 대응할 수 있고 항공기의 비행 상태를 기반으로 실시간으로 안전한 경로를 계산할 수 있어 인간 조종사보다 훨씬 빠르게 비상 상황에 대처하는 것이 가능하다.
또한 기존 로봇이 고정된 위치에서 반복적인 작업만 가능한 것에 비해 조종사 로봇은 장착된 카메라로 조종석 내부 및 항공기 외부 상황을 파악하고 조종간의 각종 스위치들을 정확하게 조작하는 것이 가능하며, 고정밀 강인 제어 기술을 적용해 진동이 심한 항공기 내부에서 정확한 로봇 팔 및 손 제어가 가능하다.
조종사 로봇은 현재 비행 조종 시뮬레이터에서 항공기의 시동부터 택싱, 이착륙, 순항, 주기 등 모든 조작을 수행하고 있으며, 연구팀은 조종사 로봇을 실제 경비행기에 적용해 항공기를 직접 조종하여 검증할 계획이다. 본 과제의 책임자인 심현철 교수는 “인간형 조종사 로봇은 기존의 항공기들을 전혀 개조하지 않고 즉각적으로 자동 비행이 가능해 실용성 및 활용성이 매우 높으며, 항공기뿐만 아니라 자동차, 장갑차 등 다양한 장치의 조작도 가능해 병력자원 고갈이 심각한 현 상황에 매우 유용하게 적용될 수 있을 것으로 기대한다”고 말했다.
한편, 동 연구과제는 국방과학연구소의 미래도전과제(총 57억원)를 지원받아 심현철 교수(연구책임자), 주재걸 교수, 윤국진 교수, 김민준 교수의 협업으로 2022년부터 개발이 진행되고 있고 개발 완성 시점은 2026년이며 민간 및 군용 활용을 목적으로 사업화 방안도 모색중이다.
2023.07.19 조회수 9987 -
 스티브 박 교수, 김정 교수, 3차원 표면 코팅 가능한 로봇피부 개발
〈(왼쪽부터) 오진원 석사과정, 스티브박 교수, 양준창 박사과정 〉
우리 대학 신소재공학과 스티브 박 교수, 기계공학과 김정 교수 공동 연구팀이 3차원 표면에 코팅이 가능하며 자극을 구분할 수 있는 로봇피부를 개발했다.
오진원 석사과정, 양준창 박사과정이 공동 1저자, 박현규 석사과정이 참여한 이번 연구는 국제학술지 ‘에이씨에스 나노(ACS Nano)’ 8월 28자 표지논문으로 게재됐다.
오늘날 로봇연구는 인간과 같은 기능을 가진 휴머노이드, 몸에 착용하는 헬스케어 장치 등 인간처럼 촉각을 구현하려는 연구가 활발히 진행되고 있다.
연구팀은 로봇의 복잡한 형상에 균일하게 코팅할 수 있는 로봇피부를 개발했다. 균일한 코팅은 로봇피부에 가해진 자극을 보다 정확히 측정할 수 있게 해주는 핵심 기술이다.
개발된 로봇피부 용액을 원하는 물체에 뿌린 뒤 굳히면 로봇피부가 형성된다. 매우 간편한 용액공정을 통해 제작하므로 저비용으로 대면적 및 대량생산이 가능하다. 또한 복잡한 형태를 지닌 로봇에도 적용할 수 있다.
특히 이 로봇피부는 인간과 같이 압력과 인장력을 구분해낸다. 수직 압력과 마찰에 대해 로봇피부의 내부구조가 각각 다르게 변형되기 때문에 이들을 구분할 수 있다.
또한 의료영상 기법 중 하나인 전기임피던스영상(EIT) 기술을 이용함으로써 복잡한 전기 배선 없이 로봇피부에 마찰이 가해지는 곳을 정확히 측정했다.
스티브 박 교수는 “개발된 로봇피부는 저비용으로 대량생산이 가능하며, 복잡한 3차원 표면에도 손쉽게 코팅이 가능하다”며, ”로봇피부의 상용화에 한 걸음 가까워질 수 있는 원천기술이다”라고 말했다.
이번 연구는 과학기술정보통신부·한국연구재단 기초연구사업(신진연구) 지원으로 수행됐다.
□ 그림 설명
그림1. 3차원 표면 코팅이 가능한 로봇피부 모식도 (ACS 나노 8월호 표지)
그림2. 전기임피던스영상법을 활용한 다양한 자극 측정
그림3. 다양한 코팅법을 활용한 로봇피부의 제작 및 로봇피부 신호 확인
2018.09.13 조회수 16956
스티브 박 교수, 김정 교수, 3차원 표면 코팅 가능한 로봇피부 개발
〈(왼쪽부터) 오진원 석사과정, 스티브박 교수, 양준창 박사과정 〉
우리 대학 신소재공학과 스티브 박 교수, 기계공학과 김정 교수 공동 연구팀이 3차원 표면에 코팅이 가능하며 자극을 구분할 수 있는 로봇피부를 개발했다.
오진원 석사과정, 양준창 박사과정이 공동 1저자, 박현규 석사과정이 참여한 이번 연구는 국제학술지 ‘에이씨에스 나노(ACS Nano)’ 8월 28자 표지논문으로 게재됐다.
오늘날 로봇연구는 인간과 같은 기능을 가진 휴머노이드, 몸에 착용하는 헬스케어 장치 등 인간처럼 촉각을 구현하려는 연구가 활발히 진행되고 있다.
연구팀은 로봇의 복잡한 형상에 균일하게 코팅할 수 있는 로봇피부를 개발했다. 균일한 코팅은 로봇피부에 가해진 자극을 보다 정확히 측정할 수 있게 해주는 핵심 기술이다.
개발된 로봇피부 용액을 원하는 물체에 뿌린 뒤 굳히면 로봇피부가 형성된다. 매우 간편한 용액공정을 통해 제작하므로 저비용으로 대면적 및 대량생산이 가능하다. 또한 복잡한 형태를 지닌 로봇에도 적용할 수 있다.
특히 이 로봇피부는 인간과 같이 압력과 인장력을 구분해낸다. 수직 압력과 마찰에 대해 로봇피부의 내부구조가 각각 다르게 변형되기 때문에 이들을 구분할 수 있다.
또한 의료영상 기법 중 하나인 전기임피던스영상(EIT) 기술을 이용함으로써 복잡한 전기 배선 없이 로봇피부에 마찰이 가해지는 곳을 정확히 측정했다.
스티브 박 교수는 “개발된 로봇피부는 저비용으로 대량생산이 가능하며, 복잡한 3차원 표면에도 손쉽게 코팅이 가능하다”며, ”로봇피부의 상용화에 한 걸음 가까워질 수 있는 원천기술이다”라고 말했다.
이번 연구는 과학기술정보통신부·한국연구재단 기초연구사업(신진연구) 지원으로 수행됐다.
□ 그림 설명
그림1. 3차원 표면 코팅이 가능한 로봇피부 모식도 (ACS 나노 8월호 표지)
그림2. 전기임피던스영상법을 활용한 다양한 자극 측정
그림3. 다양한 코팅법을 활용한 로봇피부의 제작 및 로봇피부 신호 확인
2018.09.13 조회수 16956 -
 산업통산자원부 지정 휴머노이드 로봇 연구센터 개소
<왼쪽부터 김경훈 한국산업기술평가관리원 로봇PD, 이희윤 KAIST 연구부총장, 오준호 KAIST 휴머노이드 로봇 연구센터 소장, 김정환 산업통상자원부 시스템산업정책관, 박기한 한국로봇산업진흥원장, 정윤철 KAIST KI원장>
최근 4차 산업 혁명 주요 기술의 하나로 로봇공학의 중요성이 대두되고 있다.
우리 대학은 19일(목) 대전 본교 KI빌딩에서 산업통산자원부 시스템산업정책관, 로봇산업진흥원장, 로봇 PD 등 교내·외 관계자 50여명이 참석한 가운데‘휴머노이드 로봇 연구센터(소장 오준호)’개소식을 가졌다.
산업통산자원부 지정 연구센터로 선정되어 5년간 150억 원의 지원을 받게 되는 연구센터는, 휴머노이드 로봇 분야의 세계 선도기술을 개발하고 해당 분야 석박사급 전문연구인력 양성을 목표로 하고 있다.
오준호 교수는 “지난 10여 년간 휴보 로봇개발을 통하여 축적해온 기술력을 바탕으로 △고효율·고출력 전기구동 및 유압시스템 등 로봇 핵심부품 △조작성이 뛰어나고 신뢰성 높은 인간형 로봇 시스템 △작업환경 대응 물체 인식 지능구현기술 등 휴머노이드 로봇 원천기술을 개발해 기술자립화를 이룰 계획” 이라며 “이와 함께 모듈형·확장형 오픈 소프트웨어 개발 및 확산을 통해 우리나라의 로봇기술 공유 생태계 구축에도 적극 나설 예정” 이라고 밝혔다.
오준호 교수팀(Team KAIST)은 전 세계 6개국 24개 팀이 참가한 ‘2015년 미국 DARPA(미국방위고등연구계획국) 로보틱스 챌린지(DRC)’결선대회에서 최종 우승하여 우리나라 로봇 기술의 우수성을 전 세계에 알린바 있다.
2017.01.20 조회수 14394
산업통산자원부 지정 휴머노이드 로봇 연구센터 개소
<왼쪽부터 김경훈 한국산업기술평가관리원 로봇PD, 이희윤 KAIST 연구부총장, 오준호 KAIST 휴머노이드 로봇 연구센터 소장, 김정환 산업통상자원부 시스템산업정책관, 박기한 한국로봇산업진흥원장, 정윤철 KAIST KI원장>
최근 4차 산업 혁명 주요 기술의 하나로 로봇공학의 중요성이 대두되고 있다.
우리 대학은 19일(목) 대전 본교 KI빌딩에서 산업통산자원부 시스템산업정책관, 로봇산업진흥원장, 로봇 PD 등 교내·외 관계자 50여명이 참석한 가운데‘휴머노이드 로봇 연구센터(소장 오준호)’개소식을 가졌다.
산업통산자원부 지정 연구센터로 선정되어 5년간 150억 원의 지원을 받게 되는 연구센터는, 휴머노이드 로봇 분야의 세계 선도기술을 개발하고 해당 분야 석박사급 전문연구인력 양성을 목표로 하고 있다.
오준호 교수는 “지난 10여 년간 휴보 로봇개발을 통하여 축적해온 기술력을 바탕으로 △고효율·고출력 전기구동 및 유압시스템 등 로봇 핵심부품 △조작성이 뛰어나고 신뢰성 높은 인간형 로봇 시스템 △작업환경 대응 물체 인식 지능구현기술 등 휴머노이드 로봇 원천기술을 개발해 기술자립화를 이룰 계획” 이라며 “이와 함께 모듈형·확장형 오픈 소프트웨어 개발 및 확산을 통해 우리나라의 로봇기술 공유 생태계 구축에도 적극 나설 예정” 이라고 밝혔다.
오준호 교수팀(Team KAIST)은 전 세계 6개국 24개 팀이 참가한 ‘2015년 미국 DARPA(미국방위고등연구계획국) 로보틱스 챌린지(DRC)’결선대회에서 최종 우승하여 우리나라 로봇 기술의 우수성을 전 세계에 알린바 있다.
2017.01.20 조회수 14394 -
 KAIST에 꽃핀 로봇 예술 … 인공의 뇌, 로봇은 진화 한다 전시회
진화론 : 인간에서 휴머노이드로 _ 손승현 作
자신과 닮은 또 하나의 신인류를 만들고자 하는 욕망은 과거의 역사에서 어렵지 않게 찾을 수 있다. 인간은 스스로 만든 연장물(Extension)을 통해 진화하며 결국 스스로 그들에게 길들이며 살아간다. 인간이 만든 휴머노이드 로봇이 미래의 삶을 어떻게 변화시킬 것인가를 고민해 보자는 작가의 설명이다.
KAIST 교내 KI빌딩에서 21일부터 2015년 2월 8일까지 열리는 ‘인공의 뇌, 로봇은 진화 한다’ 전시회에 참가한 손승현(43) 작가의 ‘진화론 : 인간에서 휴머노이드로’가 담은 의미다.
KAIST 예술 및 디자인위원회(위원장 김명석)가 과학과 예술의 융합을 통한 실험적 예술 전시회를 3년째 이어가고 있다.
이번 전시회는 2012년 기후 대기환경을 주제로 열린 <하늘을 보다>전과 2013년 생명의 다양성과 공생 네트워크를 주제로 열린 <생명은 아름답다>전에 이은 세 번째 기획전이다.
전시회는 ▲움직이다▲느끼다▲생각하다▲표현하다▲상상속의 실험 등 5개의 소주제로 나눠 전시된다. 백남준, 낸시랭, KAIST 김명석 교수 등 17명의 작가가 참여해 19점의 작품을 출품했다.
주요 작품으로는 컴퓨터 시각은 오류이지만 인간의 눈에는 얼굴 모습으로 보이는 ‘클라우드 페이스’(Cloud Face, 신승백 김용훈 作), KAIST 로봇 랩들의 재료와 모티브를 바탕으로 한 ‘통속의 뇌’(Brains in vat, 이부록․김명철 作)가 있다.
또 로봇의 일생을 다룬 ‘내 인생의 오월’(The May of My Life, 김명석 교수 Lab 作)은 인간과 로봇 간의 피드백을 통해 양 자 간의 새로운 관계를 다시 한 번 생각하게 하는 작품이다.
김명석 KAIST 예술 및 디자인위원장은 “문화예술의 다양한 콘텐츠는 학생들에게 풍부한 상상력을 제공할 것” 이라며 “이번 전시회가 과학적 아이디어와 함께 예술적 감각도 일깨우는 계기가 되기를 바란다”라고 말했다.
전시회 개막식은 21일 오후 2시 KI 빌딩 로비에서 출품작가, 내부구성원 등 100여 명이 참석한 가운데 열린다.
‘인공의 뇌, 로봇은 진화한다’展은 KAIST와 대전시립미술관이 주최하며 국립현대미술관과 소마미술관이 후원했다.끝.
2014.11.21 조회수 14404
KAIST에 꽃핀 로봇 예술 … 인공의 뇌, 로봇은 진화 한다 전시회
진화론 : 인간에서 휴머노이드로 _ 손승현 作
자신과 닮은 또 하나의 신인류를 만들고자 하는 욕망은 과거의 역사에서 어렵지 않게 찾을 수 있다. 인간은 스스로 만든 연장물(Extension)을 통해 진화하며 결국 스스로 그들에게 길들이며 살아간다. 인간이 만든 휴머노이드 로봇이 미래의 삶을 어떻게 변화시킬 것인가를 고민해 보자는 작가의 설명이다.
KAIST 교내 KI빌딩에서 21일부터 2015년 2월 8일까지 열리는 ‘인공의 뇌, 로봇은 진화 한다’ 전시회에 참가한 손승현(43) 작가의 ‘진화론 : 인간에서 휴머노이드로’가 담은 의미다.
KAIST 예술 및 디자인위원회(위원장 김명석)가 과학과 예술의 융합을 통한 실험적 예술 전시회를 3년째 이어가고 있다.
이번 전시회는 2012년 기후 대기환경을 주제로 열린 <하늘을 보다>전과 2013년 생명의 다양성과 공생 네트워크를 주제로 열린 <생명은 아름답다>전에 이은 세 번째 기획전이다.
전시회는 ▲움직이다▲느끼다▲생각하다▲표현하다▲상상속의 실험 등 5개의 소주제로 나눠 전시된다. 백남준, 낸시랭, KAIST 김명석 교수 등 17명의 작가가 참여해 19점의 작품을 출품했다.
주요 작품으로는 컴퓨터 시각은 오류이지만 인간의 눈에는 얼굴 모습으로 보이는 ‘클라우드 페이스’(Cloud Face, 신승백 김용훈 作), KAIST 로봇 랩들의 재료와 모티브를 바탕으로 한 ‘통속의 뇌’(Brains in vat, 이부록․김명철 作)가 있다.
또 로봇의 일생을 다룬 ‘내 인생의 오월’(The May of My Life, 김명석 교수 Lab 作)은 인간과 로봇 간의 피드백을 통해 양 자 간의 새로운 관계를 다시 한 번 생각하게 하는 작품이다.
김명석 KAIST 예술 및 디자인위원장은 “문화예술의 다양한 콘텐츠는 학생들에게 풍부한 상상력을 제공할 것” 이라며 “이번 전시회가 과학적 아이디어와 함께 예술적 감각도 일깨우는 계기가 되기를 바란다”라고 말했다.
전시회 개막식은 21일 오후 2시 KI 빌딩 로비에서 출품작가, 내부구성원 등 100여 명이 참석한 가운데 열린다.
‘인공의 뇌, 로봇은 진화한다’展은 KAIST와 대전시립미술관이 주최하며 국립현대미술관과 소마미술관이 후원했다.끝.
2014.11.21 조회수 14404 -
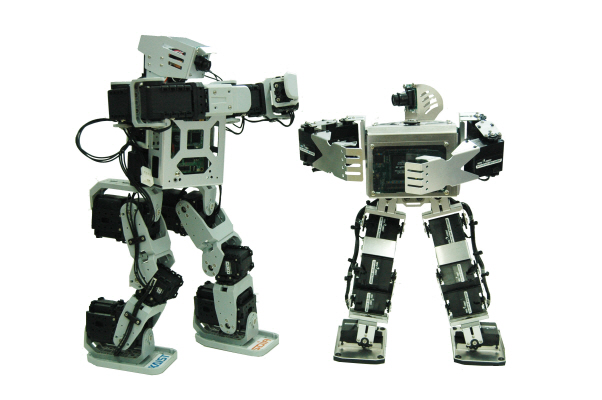 '지능형 SoC 로봇워 2010' 개최
우리학교는 국내 최대 규모의 지능형 로봇대회인 ‘지능형 SoC 로봇워 2010’을 28일부터 31일까지 나흘간 일산 KINTEX에서 개최한다.
SoC(System on Chip) 로봇이란 중앙처리장치(CPU), 메모리 등을 탑재해 외부에서의 원격 조종 없이 스스로 사물을 인식하고 판단할 수 있는 로봇이다.
대회종목은 ‘HURO-Competition’과 ‘SoC 태권로봇’ 두 부문으로 나뉘며, 모든 로봇들은 사람의 조종이 아닌 스스로의 지능을 통해 경기를 치른다.
‘HURO-Competition’은 지능형 휴머노이드 로봇의 최강자를 가리는 종목으로 계단 오르기, 터널 지나가기, 장애물 피해가기 등 다양한 미션의 예선경기가 진행되며, 최종 격투 경기를 통해 순위가 결정된다.
또한, ‘SoC 태권로봇’은 휴머노이드 로봇간의 태권도 겨루기로, 상대로봇의 동작과 위치, 거리를 인식해 태권도 동작으로 상대로봇을 공격해 점수를 획득하는 경기다.
참가자들은 대학(원)생으로 구성되며 참가팀 설명회, 출전자격평가, 이론 및 실습교육 등을 거쳐 전국 17개 대학 28개 팀이 참가한다.
이번 대회에서 주목할 만한 부분은 올해 처음으로 진행되는 ‘HURO-Competition’이다. 영상인식 뿐만 아니라, 센서인식, 로봇 내비게이션 등 다양한 기술이 집약된 형태의 경기로, 로봇 스스로 계단을 인식해 오르내리며, 장애물을 인식하고 피해가기 등 흥미진진한 경기가 진행된다.
대회위원장인 유회준 전기전자공학과 교수는 “대회 초창기 로봇은 단순한 장애물조차 인식하기 힘들었다”고 회고하며, “국내 로봇 기술의 많은 향상이 있었지만, 로봇의 지능에 대해서는 아직 할 일이 많다. 이제는 로봇의 지능에 더욱 많은 연구가 진행되어야 한다”고 말했다.
한편, ‘지능형 SoC 로봇워’는 지난 2002년을 시작으로 9회째를 맞이하고 있는 대회로 지식경제부가 주최한다.
2010.10.27 조회수 15650
'지능형 SoC 로봇워 2010' 개최
우리학교는 국내 최대 규모의 지능형 로봇대회인 ‘지능형 SoC 로봇워 2010’을 28일부터 31일까지 나흘간 일산 KINTEX에서 개최한다.
SoC(System on Chip) 로봇이란 중앙처리장치(CPU), 메모리 등을 탑재해 외부에서의 원격 조종 없이 스스로 사물을 인식하고 판단할 수 있는 로봇이다.
대회종목은 ‘HURO-Competition’과 ‘SoC 태권로봇’ 두 부문으로 나뉘며, 모든 로봇들은 사람의 조종이 아닌 스스로의 지능을 통해 경기를 치른다.
‘HURO-Competition’은 지능형 휴머노이드 로봇의 최강자를 가리는 종목으로 계단 오르기, 터널 지나가기, 장애물 피해가기 등 다양한 미션의 예선경기가 진행되며, 최종 격투 경기를 통해 순위가 결정된다.
또한, ‘SoC 태권로봇’은 휴머노이드 로봇간의 태권도 겨루기로, 상대로봇의 동작과 위치, 거리를 인식해 태권도 동작으로 상대로봇을 공격해 점수를 획득하는 경기다.
참가자들은 대학(원)생으로 구성되며 참가팀 설명회, 출전자격평가, 이론 및 실습교육 등을 거쳐 전국 17개 대학 28개 팀이 참가한다.
이번 대회에서 주목할 만한 부분은 올해 처음으로 진행되는 ‘HURO-Competition’이다. 영상인식 뿐만 아니라, 센서인식, 로봇 내비게이션 등 다양한 기술이 집약된 형태의 경기로, 로봇 스스로 계단을 인식해 오르내리며, 장애물을 인식하고 피해가기 등 흥미진진한 경기가 진행된다.
대회위원장인 유회준 전기전자공학과 교수는 “대회 초창기 로봇은 단순한 장애물조차 인식하기 힘들었다”고 회고하며, “국내 로봇 기술의 많은 향상이 있었지만, 로봇의 지능에 대해서는 아직 할 일이 많다. 이제는 로봇의 지능에 더욱 많은 연구가 진행되어야 한다”고 말했다.
한편, ‘지능형 SoC 로봇워’는 지난 2002년을 시작으로 9회째를 맞이하고 있는 대회로 지식경제부가 주최한다.
2010.10.27 조회수 15650 -
 덴마크 라스무슨 총리, KAIST 기술 놀랍다!
덴마크의 라스 라스무슨(Lars Rasmussen) 총리가 2010년 3월 11일(목) 오후 2시 20분 우리학교 문지캠퍼스를 30여 분 동안 방문했다. 신재생에너지와 환경 등 녹색성장 분야의 협력증진을 위해 한국을 방문 중인 라스 뢰케 라스무슨(Lars Løkke Rasmussen) 덴마크 총리 등 방문단 50여명은 11일 문지캠퍼스 슈펙스홀을 찾았다.
이 때, 라스무슨 덴마크 총리 방문단을 처음 반겨준 것은 휴보(HUBO). 휴보는 라스무슨 총리가 건물안으로 들어서자 들고 있던 꽃다발을 전해주고 악수를 청하는 등 방문단을 반갑게 맞았다. 이어 "KAIST를 방문해 주셔서 감사합니다. 저는 이전에 만들어졌던 은퇴한 2명의 형제들보다 훨씬 진보된 기술로 만들어졌습니다" 등의 인사를 덴마크어로 설명해 방문단을 놀라게 했다.
라스무슨 총리는 이날 서남표 KAIST 총장을 비롯한 덴마크 정부 관계자, KAIST 학교 관계자 등 50여 명이 참석한 가운데 열린 환영식에서 서로 인사를 나눈 뒤 KAIST가 개발한 휴머노이드 로봇 ‘휴보(HUBO)’로부터 환영 꽃다발을 받은 뒤 웃음을 띠며 휴보와 악수를 나눴다. 그리고 KAIST가 개발한 ‘온라인 전기자동차(On-Line Electric Vehicle·OLEV)’ 시승식에서 우리학교에서 세계최초로 개발한 온라인 전기자동차에 대한 지대한 관심을 표명했다. 그는 “덴마크는 현재 녹색기술에 굉장히 관심이 많은데 OLEV를 보니 매우 인상적”이라며 “KAIST가 짧은 역사 속에 세계에서 훌륭한 연구중심대학으로 발전한 게 놀라울 따름”이라고 격찬을 아끼지 않았다.
한편 대전일보는 2010년 3월 12일자로 라스무슨 덴마크 총리의 KAIST 방문 행사를 1면TOP 보도했다.
관련기사보기
대전 KAIST 찾은 덴마크 라스무슨 총리 - 대전일보 2010-3-12(금) 1면TOP보도
라스무슨 덴마크 총리, "KAIST 비약적 발전 이뤄" - 대덕넷(hellodd.com) 2010-3-11자
휴보의 환영을 받고 있는 라스 라스무슨 덴마크 총리
2010.03.12 조회수 17553
덴마크 라스무슨 총리, KAIST 기술 놀랍다!
덴마크의 라스 라스무슨(Lars Rasmussen) 총리가 2010년 3월 11일(목) 오후 2시 20분 우리학교 문지캠퍼스를 30여 분 동안 방문했다. 신재생에너지와 환경 등 녹색성장 분야의 협력증진을 위해 한국을 방문 중인 라스 뢰케 라스무슨(Lars Løkke Rasmussen) 덴마크 총리 등 방문단 50여명은 11일 문지캠퍼스 슈펙스홀을 찾았다.
이 때, 라스무슨 덴마크 총리 방문단을 처음 반겨준 것은 휴보(HUBO). 휴보는 라스무슨 총리가 건물안으로 들어서자 들고 있던 꽃다발을 전해주고 악수를 청하는 등 방문단을 반갑게 맞았다. 이어 "KAIST를 방문해 주셔서 감사합니다. 저는 이전에 만들어졌던 은퇴한 2명의 형제들보다 훨씬 진보된 기술로 만들어졌습니다" 등의 인사를 덴마크어로 설명해 방문단을 놀라게 했다.
라스무슨 총리는 이날 서남표 KAIST 총장을 비롯한 덴마크 정부 관계자, KAIST 학교 관계자 등 50여 명이 참석한 가운데 열린 환영식에서 서로 인사를 나눈 뒤 KAIST가 개발한 휴머노이드 로봇 ‘휴보(HUBO)’로부터 환영 꽃다발을 받은 뒤 웃음을 띠며 휴보와 악수를 나눴다. 그리고 KAIST가 개발한 ‘온라인 전기자동차(On-Line Electric Vehicle·OLEV)’ 시승식에서 우리학교에서 세계최초로 개발한 온라인 전기자동차에 대한 지대한 관심을 표명했다. 그는 “덴마크는 현재 녹색기술에 굉장히 관심이 많은데 OLEV를 보니 매우 인상적”이라며 “KAIST가 짧은 역사 속에 세계에서 훌륭한 연구중심대학으로 발전한 게 놀라울 따름”이라고 격찬을 아끼지 않았다.
한편 대전일보는 2010년 3월 12일자로 라스무슨 덴마크 총리의 KAIST 방문 행사를 1면TOP 보도했다.
관련기사보기
대전 KAIST 찾은 덴마크 라스무슨 총리 - 대전일보 2010-3-12(금) 1면TOP보도
라스무슨 덴마크 총리, "KAIST 비약적 발전 이뤄" - 대덕넷(hellodd.com) 2010-3-11자
휴보의 환영을 받고 있는 라스 라스무슨 덴마크 총리
2010.03.12 조회수 17553 -
 오준호, 강석중 교수, KAIST특훈교수로 임명!
우리학교는 KAIST 최고의 영예를 갖게 되는 특훈교수(Distinguished Professor)에 기계공학과 오준호(56세, 좌측사진) 교수, 신소재공학과 강석중(60세) 교수 등 2명을 지난 3월 1일 추가로 임명했다. 이로써 우리학교는 2007년 3명, 2008년 2명, 2010년 2명 등 총 7명을 특훈교수로 임명하게 됐다.
오 교수는 2004년 12월에 한국 최초의 휴머노이드 로봇인 ‘휴보(HUBO)‘를 개발했다. 적은 연구비로 3년이라는 단기간에 휴보를 개발해 국민에게 자부심과 긍지를 심어줬다. 2009년 10월에는 휴보의 성능개선작업을 통해 달리는 휴보를 탄생시켜 한국을 로봇강국으로 이끌고 있다. 또한 휴보(Hubo)를 미국 휴머노이드 로봇연구의 플랫폼으로 제공하는 성과를 거뒀다.이러한 그의 연구 성과는 국.내외 각종 언론 및 다큐멘터리 프로그램에 소개됐다. 이외에도 초정밀 가속도계 기술을 국산화 했고, 모바일하버 개발에 참여해 탁월한 연구개발 성과를 냈다.이러한 공로를 인정받아 2005년에는 ‘올해의 KAIST인 상’, 2010년에는 ‘KAIST 연구대상’을 수상했고, 지난해 12월에는 로봇산업 발전에 기여한 공로를 인정받아 ‘대통령상’을 수상했다.
강 교수는 소결(Sintering) 및 다결정체 입자성장과 관련된 연구분야의 세계적인 권위자다. 특히 비정상 입자성장과 액상소결에 대한 이론적 성과는 매우 독창적이며, 현재까지 의문시 되어왔던 문제점을 해결하여 많은 논문이나 교과서에서 인용되고 있다. 또한 그의 소결이론은 금속, 세라믹 신소재 부품제조과정에서 나타나는 소결현상을 해석할 수 있는 기초지식을 제공해 산업발전에도 크게 기여하고 있다. 이러한 연구결과는 권위 있는 재료공학 분야 학술지에 게재되었으며, 10회의 기조, 주제강연(Plenary and Keynote Lecture)과 100여회의 초청강연으로 발표되는 등 그 연구의 우수성을 세계적으로 인정받고 있다. 강 교수는 이러한 학문적 성과를 인정받아 2007년에는 (재)인촌기념회에서 수여하는 ‘제21회 인촌상’을 수상한 바 있다.
KAIST 특훈교수는 세계적 수준의 연구업적과 교육성과를 이룬 교수 중에서 선발되는 KAIST 최고의 명예로운 직이다. 특별인센티브가 지급되며, 정년 이후에도 비전임직으로 계속 근무할 수 있다.특훈교수는 총장, 부총장, 단과대학장, 학과장의 추천을 받은 후, 국내외 전문가의 평가를 거쳐 임명하며, 교수 총 정원의 3%내에서 선발할 수 있도록 되어 있다.이 제도는 2007년 3월 처음으로 시행됐으며, 첫 특훈교수로 전기전자공학과 김충기 교수, 생명화학공학과 이상엽 교수, 물리학과 장기주 교수 등 3명이 선정됐고, 2008년 5월에는 화학과 유룡 교수, 전산학과 황규영 교수 등 2명이 임명된바 있다. KAIST는 특훈교수제 등의 새로운 제도를 적극 활용하여 발전 가능성이 높은 연구분야의 우수 교수를 집중 유치, 세계 최고 수준의 교수진을 구축하고 있다.
<용어설명>
○ 소결(Sintering)소결은 금속이나 세라믹 분말부터 성형체를 만든 후 열에너지를 가해줌으로서 부품 소재를 만드는 데 이용되는 공정을 일컫는다. 소결은 선사시대 토기를 만들 때부터 사용해 온 기술로서, 최근에는 분말야금 소재, 세라믹 소재를 제조하는 데에 활용된다. 많은 자동차용 부품, 전자부품(다층세라믹 콘덴서 등), 기계부품 등이 소결 제품이다.
○ 다결정체
우리가 사용하는 대부분의 금속, 세라믹 벌크소재는 작은 단결정들(nm~mm 크기)의 집합체인 다결정체이다. 다결정체를 가공하거나 열처리 하는 중에는 결정체의 평균입자 크기가 증가하는 입자성장이 일어나며 입자성장 양상에 따라 다결정체의 조직이 변화하고 물리적 성질도 변화한다.
2010.03.04 조회수 20600
오준호, 강석중 교수, KAIST특훈교수로 임명!
우리학교는 KAIST 최고의 영예를 갖게 되는 특훈교수(Distinguished Professor)에 기계공학과 오준호(56세, 좌측사진) 교수, 신소재공학과 강석중(60세) 교수 등 2명을 지난 3월 1일 추가로 임명했다. 이로써 우리학교는 2007년 3명, 2008년 2명, 2010년 2명 등 총 7명을 특훈교수로 임명하게 됐다.
오 교수는 2004년 12월에 한국 최초의 휴머노이드 로봇인 ‘휴보(HUBO)‘를 개발했다. 적은 연구비로 3년이라는 단기간에 휴보를 개발해 국민에게 자부심과 긍지를 심어줬다. 2009년 10월에는 휴보의 성능개선작업을 통해 달리는 휴보를 탄생시켜 한국을 로봇강국으로 이끌고 있다. 또한 휴보(Hubo)를 미국 휴머노이드 로봇연구의 플랫폼으로 제공하는 성과를 거뒀다.이러한 그의 연구 성과는 국.내외 각종 언론 및 다큐멘터리 프로그램에 소개됐다. 이외에도 초정밀 가속도계 기술을 국산화 했고, 모바일하버 개발에 참여해 탁월한 연구개발 성과를 냈다.이러한 공로를 인정받아 2005년에는 ‘올해의 KAIST인 상’, 2010년에는 ‘KAIST 연구대상’을 수상했고, 지난해 12월에는 로봇산업 발전에 기여한 공로를 인정받아 ‘대통령상’을 수상했다.
강 교수는 소결(Sintering) 및 다결정체 입자성장과 관련된 연구분야의 세계적인 권위자다. 특히 비정상 입자성장과 액상소결에 대한 이론적 성과는 매우 독창적이며, 현재까지 의문시 되어왔던 문제점을 해결하여 많은 논문이나 교과서에서 인용되고 있다. 또한 그의 소결이론은 금속, 세라믹 신소재 부품제조과정에서 나타나는 소결현상을 해석할 수 있는 기초지식을 제공해 산업발전에도 크게 기여하고 있다. 이러한 연구결과는 권위 있는 재료공학 분야 학술지에 게재되었으며, 10회의 기조, 주제강연(Plenary and Keynote Lecture)과 100여회의 초청강연으로 발표되는 등 그 연구의 우수성을 세계적으로 인정받고 있다. 강 교수는 이러한 학문적 성과를 인정받아 2007년에는 (재)인촌기념회에서 수여하는 ‘제21회 인촌상’을 수상한 바 있다.
KAIST 특훈교수는 세계적 수준의 연구업적과 교육성과를 이룬 교수 중에서 선발되는 KAIST 최고의 명예로운 직이다. 특별인센티브가 지급되며, 정년 이후에도 비전임직으로 계속 근무할 수 있다.특훈교수는 총장, 부총장, 단과대학장, 학과장의 추천을 받은 후, 국내외 전문가의 평가를 거쳐 임명하며, 교수 총 정원의 3%내에서 선발할 수 있도록 되어 있다.이 제도는 2007년 3월 처음으로 시행됐으며, 첫 특훈교수로 전기전자공학과 김충기 교수, 생명화학공학과 이상엽 교수, 물리학과 장기주 교수 등 3명이 선정됐고, 2008년 5월에는 화학과 유룡 교수, 전산학과 황규영 교수 등 2명이 임명된바 있다. KAIST는 특훈교수제 등의 새로운 제도를 적극 활용하여 발전 가능성이 높은 연구분야의 우수 교수를 집중 유치, 세계 최고 수준의 교수진을 구축하고 있다.
<용어설명>
○ 소결(Sintering)소결은 금속이나 세라믹 분말부터 성형체를 만든 후 열에너지를 가해줌으로서 부품 소재를 만드는 데 이용되는 공정을 일컫는다. 소결은 선사시대 토기를 만들 때부터 사용해 온 기술로서, 최근에는 분말야금 소재, 세라믹 소재를 제조하는 데에 활용된다. 많은 자동차용 부품, 전자부품(다층세라믹 콘덴서 등), 기계부품 등이 소결 제품이다.
○ 다결정체
우리가 사용하는 대부분의 금속, 세라믹 벌크소재는 작은 단결정들(nm~mm 크기)의 집합체인 다결정체이다. 다결정체를 가공하거나 열처리 하는 중에는 결정체의 평균입자 크기가 증가하는 입자성장이 일어나며 입자성장 양상에 따라 다결정체의 조직이 변화하고 물리적 성질도 변화한다.
2010.03.04 조회수 20600 -
 가수 김장훈, SBS '강심장'에서 HUBO 에피소드 밝혀
유명가수 김장훈이 지난 12월 22일(화) 밤 11시경, SBS-TV에서 방영된 예능프로 "강심장"에 출연해서 우리학교에서 개발한 휴머노이드 로봇 HUBO(휴보)와 관련된 이야기를 밝혀 큰 관심을 끌었다. 그 관련기사는 동아일보사의 사이언스 전문 웹매체인 더 사이언스에서 소개됐다.
제목: 휴보, 예능 프로그램 출연 ... 1위 차지
부제: 가수 김장훈, SBS "강심장"에서 에피소드 밝혀
매체: THE SCIENCE (동아일보 동아사이언스에서 발행하는 인터넷신문)
일자: 2009년 12월 23일(수)
기자: 동아사이언스 전동혁 기자
관련기사링크: 휴보, 예능 프로그램 출연 ... 1위 차지
2009.12.24 조회수 14774
가수 김장훈, SBS '강심장'에서 HUBO 에피소드 밝혀
유명가수 김장훈이 지난 12월 22일(화) 밤 11시경, SBS-TV에서 방영된 예능프로 "강심장"에 출연해서 우리학교에서 개발한 휴머노이드 로봇 HUBO(휴보)와 관련된 이야기를 밝혀 큰 관심을 끌었다. 그 관련기사는 동아일보사의 사이언스 전문 웹매체인 더 사이언스에서 소개됐다.
제목: 휴보, 예능 프로그램 출연 ... 1위 차지
부제: 가수 김장훈, SBS "강심장"에서 에피소드 밝혀
매체: THE SCIENCE (동아일보 동아사이언스에서 발행하는 인터넷신문)
일자: 2009년 12월 23일(수)
기자: 동아사이언스 전동혁 기자
관련기사링크: 휴보, 예능 프로그램 출연 ... 1위 차지
2009.12.24 조회수 14774 -
 휴보아버지 오준호교수, 대통령표창 수상
우리학교 기계공학과 오준호 교수가 제4회 대한민국 로봇대상 및 로봇산업인의 밤 행사에서 최고의 영예인 "대통령 표창"을 수상했다. 정운찬 국무총리, 곽승준 대통령직속 미래기획위원장, 임채민 지경부 제1차관을 비롯한 로봇 산·학·연 관계자 등 200여명이 참석한 가운데 2009.12.3(목) 16:30부터 63시티 코스모스홀에서 개최된 이날 행사에서는 그 동안 로봇산업 경쟁력강화에 기여한 유공자 7명과 우수한 로봇제품 개발을 통해 로봇산업 발전에 기여한 6개 기업에 대해 포상을 실시했다.
로봇산업발전 유공자 부문에서 영예의 대통령 표창은 한국최초의 휴머노이드 로봇인 휴보(HUBO)를 개발함으로써 우리나라를 제2위의 휴머노이드 로봇개발국으로 도약시킨 우리학교 오준호 교수가 수상했으며, 국무총리 표창은 유콘시스템(주) 배진근 전무, 지식경제부 장관표창은 우리학교 산업디자인학과 김명석 교수, 한국기계연구원 경진호 책임연구원, 한성대학교 조혜경 교수, 현대로템(주) 이정엽 책임연구원, 전자신문사 배일한 미래팀장 등 7명이 수상했다.
한편, 올해의 우수 로봇제품을 선정하는 지능형로봇기술대상 부문 대통령상은 ‘로봇전용 액츄에이터’을 개발한 ‘(주)로보티즈(대표 김병수)’가 수상하였는데, 이 제품의 Dynamixel은 감속기, 제어기, 구동기 및 Network 기능 등을 일체형으로 구성하여 하나의 모듈로 만든 새로운 개념의 로봇전용 스마트 액츄에이터이다. 국무총리상은 (주)도담시스템스(대표 문영남), 지경부 장관상은 호야로봇(주)(대표 이소열), (주)엔티리서치(대표 김경황)에서 각각 수상했다.
이날 행사에서 정운찬 국무총리는 어려운 여건에도 불구하고 로봇산업 발전을 위해 노력한 로봇산업인들을 치하하며, “로봇이 미래 우리경제의 성장을 이끌어 갈 신성장동력이 될 것”이라고 강조하고, “로봇산업인들이 미래를 대비한 연구개발과 인력양성에 매진”해 줄 것을 당부했다. 또한, “로봇기술 강국으로 도약할 수 있도록 정부도 연구개발 예산을 확충하고, 규제를 과감히 개혁하여 기업의 투자여건을 개선” 할 것을 약속하기도 했다.
특히, 이번 행사에서 오준호 교수는 국내 최초 휴머노이드 로봇인 휴보의 달리기 기능 등이 시연되어 큰 관심을 끌었다. 휴머노이드 로봇의 달리기 공개 시연은 국내 최초로 세계에서 3번째이자 국가로는 일본에 이어 2번째로, 시속 3.6Km의 속력으로 두 발로 달림으로서 우리나라의 우수한 휴머노이드 로봇기술을 대내외에 과시했다. 이날 휴보는 뛰는 기능 이외에도 사람처럼 손목을 빙빙 돌리는 기능, 5개의 손가락에 센서가 들어있어 복잡한 형태의 물건을 떨어뜨리지 않고 쥐는 기능도 같이 선보였다. 개발책임자인 오준호 교수는 “앞으로 휴보가 더 빨리 달리고, 방향전환도 자유롭게 할 수 있도록 개발할 계획”이라고 밝혔다.
2009.12.04 조회수 16983
휴보아버지 오준호교수, 대통령표창 수상
우리학교 기계공학과 오준호 교수가 제4회 대한민국 로봇대상 및 로봇산업인의 밤 행사에서 최고의 영예인 "대통령 표창"을 수상했다. 정운찬 국무총리, 곽승준 대통령직속 미래기획위원장, 임채민 지경부 제1차관을 비롯한 로봇 산·학·연 관계자 등 200여명이 참석한 가운데 2009.12.3(목) 16:30부터 63시티 코스모스홀에서 개최된 이날 행사에서는 그 동안 로봇산업 경쟁력강화에 기여한 유공자 7명과 우수한 로봇제품 개발을 통해 로봇산업 발전에 기여한 6개 기업에 대해 포상을 실시했다.
로봇산업발전 유공자 부문에서 영예의 대통령 표창은 한국최초의 휴머노이드 로봇인 휴보(HUBO)를 개발함으로써 우리나라를 제2위의 휴머노이드 로봇개발국으로 도약시킨 우리학교 오준호 교수가 수상했으며, 국무총리 표창은 유콘시스템(주) 배진근 전무, 지식경제부 장관표창은 우리학교 산업디자인학과 김명석 교수, 한국기계연구원 경진호 책임연구원, 한성대학교 조혜경 교수, 현대로템(주) 이정엽 책임연구원, 전자신문사 배일한 미래팀장 등 7명이 수상했다.
한편, 올해의 우수 로봇제품을 선정하는 지능형로봇기술대상 부문 대통령상은 ‘로봇전용 액츄에이터’을 개발한 ‘(주)로보티즈(대표 김병수)’가 수상하였는데, 이 제품의 Dynamixel은 감속기, 제어기, 구동기 및 Network 기능 등을 일체형으로 구성하여 하나의 모듈로 만든 새로운 개념의 로봇전용 스마트 액츄에이터이다. 국무총리상은 (주)도담시스템스(대표 문영남), 지경부 장관상은 호야로봇(주)(대표 이소열), (주)엔티리서치(대표 김경황)에서 각각 수상했다.
이날 행사에서 정운찬 국무총리는 어려운 여건에도 불구하고 로봇산업 발전을 위해 노력한 로봇산업인들을 치하하며, “로봇이 미래 우리경제의 성장을 이끌어 갈 신성장동력이 될 것”이라고 강조하고, “로봇산업인들이 미래를 대비한 연구개발과 인력양성에 매진”해 줄 것을 당부했다. 또한, “로봇기술 강국으로 도약할 수 있도록 정부도 연구개발 예산을 확충하고, 규제를 과감히 개혁하여 기업의 투자여건을 개선” 할 것을 약속하기도 했다.
특히, 이번 행사에서 오준호 교수는 국내 최초 휴머노이드 로봇인 휴보의 달리기 기능 등이 시연되어 큰 관심을 끌었다. 휴머노이드 로봇의 달리기 공개 시연은 국내 최초로 세계에서 3번째이자 국가로는 일본에 이어 2번째로, 시속 3.6Km의 속력으로 두 발로 달림으로서 우리나라의 우수한 휴머노이드 로봇기술을 대내외에 과시했다. 이날 휴보는 뛰는 기능 이외에도 사람처럼 손목을 빙빙 돌리는 기능, 5개의 손가락에 센서가 들어있어 복잡한 형태의 물건을 떨어뜨리지 않고 쥐는 기능도 같이 선보였다. 개발책임자인 오준호 교수는 “앞으로 휴보가 더 빨리 달리고, 방향전환도 자유롭게 할 수 있도록 개발할 계획”이라고 밝혔다.
2009.12.04 조회수 16983 -
 IEEE 휴머노이드 로봇 국제학술대회 개최
- 오는 12월1일부터 3일간, KAIST와 유성 리베라호텔에서
- 총 7개의 특별강좌와 1백10여편의 관련논문 발표 예정- 국내 처음 개최, 19개국 2백여명의 로봇관련 최고 저명 인사와 석학 대거 참여
세계 최대 학술단체 중 하나인 IEEE(전기전자기술자협회, Institute for Electric and Electronic Engineers) 주관으로 휴머노이드 로봇분야 최고의 권위를 자랑하는 휴머노이드 로봇 국제학술대회(Humanoids 2008, 8thIEEE International Conferenceon Humanoid Robots)가 오는 12월 1일(월)부터 3일(수)까지 3일간의 일정으로 KAIST와 유성 리베라 호텔에서 개최된다.
기계공학과 오준호(吳俊鎬, 54) 교수는 2007년 美 카네기 멜론대학에서 개최되었던 Humanoids 2007 회의에서 2008년 대한민국에서의 개최를 제안했으며, 열띤 심사와 경쟁을 거쳐 학술대회를 유치케 되었다.
올해로 8회째로 맞는 이 학술대회는 지난 2000년 美 보스턴에서 열린 첫 대회를 시작으로 매년 세계 주요 로봇 과학기술 중심지에서 개최된다. 일본 쯔쿠바(Tsukuba), 이탈리아 제노아(Genoa), 미국 카네기 멜론대학에 이어 국내에서 처음으로 열리는 이번 학술대회에서 국내 최초로 휴머노이드 로봇 휴보(HUBO)를 개발한 KAIST 오준호 교수가 대회장을 맡고 있으며, 한국자동제어로봇시스템학회(ICROS) 주관으로 세계 19개국 200여명의 국내외 로봇관련 최고의 저명인사와 석학들이 대거 참석할 예정이다. 12월 1일에는 국내외 로봇관련 저명인사들이 강의하는 로봇 관련 7개의 특별강좌가 있고 이어 2일과 3일에는 110여편의 논문 발표가 이어진다. 200여편의 제출된 논문 중 전문가들에 의해서 110여편의 구두 및 포스터 논문을 특별히 엄선하여 발표할 예정이다. 또한 대회기간 중 열리는 전시회에는 국내외 6개 로봇 관련 기업이 제품을 시연함으로써 기업체와 연구자간의 기술을 공유할 기회를 제공할 계획이다.
또한, 이번 학술대회 기간 중에는 세계적으로 유명한 착용로봇 HAL을 개발한 일본 쯔쿠바대학의 요시우키 산카이 교수와 인체동역학 분야의 대가인 미시간대학 아트 쿠오 교수의 특별 강연이 있다. 특별 프로그램으로는 로봇 과학자를 꿈꾸는 청소년들에게 호기심과 상상력을 키워주기 위해 마련된 강연회(제목: 소형 휴머노이드 로봇기술)가 있다. 이 강연회는 무료이며 청소년이면 누구나 참석할 수 있다. 참석을 원하는 사람은 학술회의 홈페이지(www.humanoids2008.org)나 이메일(secretary@humanoids2008.org)을 통하여 사전등록(50명)할 수 있다.
인간을 모방한 휴머노이드로봇은 기술 발전에 대한 상징성이 매우 크고, 현재 사람들이 생활하고 있는 생활공간에 직접 투입하여 활용할 수 있다는 점에서 개발을 위한 노력이 일본, 미국 등의 선진국들을 중심으로 지속적으로 이뤄지고 있다. 이번 학술대회 개최는 최첨단 국제로봇산업기술교류 증대와 함께 IT기술 강국으로서의 한국 로봇산업이 발전할 수 있는 촉매제 역할을 할 뿐만 아니라, 더 나아가 전 세계의 로봇기술에 이바지 하게 될 것으로 전망된다.
제8회 휴머노이드로봇 학술대회의 대한민국 개최는 우리나라의 로봇기술이 국제적으로 인정받고 있고 있음을 확인한 것이며, 내방하는 해외 전문가들에게 다시한번 우리의 기술을 각인시켜주는 계기가 될 것이다. 행사 기간 중 모든 참석자는 KAIST 휴머노이드로봇 연구센터(소장 오준호 교수)와 인간로봇상호작용연구센터(소장 권동수 교수)를 방문할 예정이다.
2008.11.28 조회수 20310
IEEE 휴머노이드 로봇 국제학술대회 개최
- 오는 12월1일부터 3일간, KAIST와 유성 리베라호텔에서
- 총 7개의 특별강좌와 1백10여편의 관련논문 발표 예정- 국내 처음 개최, 19개국 2백여명의 로봇관련 최고 저명 인사와 석학 대거 참여
세계 최대 학술단체 중 하나인 IEEE(전기전자기술자협회, Institute for Electric and Electronic Engineers) 주관으로 휴머노이드 로봇분야 최고의 권위를 자랑하는 휴머노이드 로봇 국제학술대회(Humanoids 2008, 8thIEEE International Conferenceon Humanoid Robots)가 오는 12월 1일(월)부터 3일(수)까지 3일간의 일정으로 KAIST와 유성 리베라 호텔에서 개최된다.
기계공학과 오준호(吳俊鎬, 54) 교수는 2007년 美 카네기 멜론대학에서 개최되었던 Humanoids 2007 회의에서 2008년 대한민국에서의 개최를 제안했으며, 열띤 심사와 경쟁을 거쳐 학술대회를 유치케 되었다.
올해로 8회째로 맞는 이 학술대회는 지난 2000년 美 보스턴에서 열린 첫 대회를 시작으로 매년 세계 주요 로봇 과학기술 중심지에서 개최된다. 일본 쯔쿠바(Tsukuba), 이탈리아 제노아(Genoa), 미국 카네기 멜론대학에 이어 국내에서 처음으로 열리는 이번 학술대회에서 국내 최초로 휴머노이드 로봇 휴보(HUBO)를 개발한 KAIST 오준호 교수가 대회장을 맡고 있으며, 한국자동제어로봇시스템학회(ICROS) 주관으로 세계 19개국 200여명의 국내외 로봇관련 최고의 저명인사와 석학들이 대거 참석할 예정이다. 12월 1일에는 국내외 로봇관련 저명인사들이 강의하는 로봇 관련 7개의 특별강좌가 있고 이어 2일과 3일에는 110여편의 논문 발표가 이어진다. 200여편의 제출된 논문 중 전문가들에 의해서 110여편의 구두 및 포스터 논문을 특별히 엄선하여 발표할 예정이다. 또한 대회기간 중 열리는 전시회에는 국내외 6개 로봇 관련 기업이 제품을 시연함으로써 기업체와 연구자간의 기술을 공유할 기회를 제공할 계획이다.
또한, 이번 학술대회 기간 중에는 세계적으로 유명한 착용로봇 HAL을 개발한 일본 쯔쿠바대학의 요시우키 산카이 교수와 인체동역학 분야의 대가인 미시간대학 아트 쿠오 교수의 특별 강연이 있다. 특별 프로그램으로는 로봇 과학자를 꿈꾸는 청소년들에게 호기심과 상상력을 키워주기 위해 마련된 강연회(제목: 소형 휴머노이드 로봇기술)가 있다. 이 강연회는 무료이며 청소년이면 누구나 참석할 수 있다. 참석을 원하는 사람은 학술회의 홈페이지(www.humanoids2008.org)나 이메일(secretary@humanoids2008.org)을 통하여 사전등록(50명)할 수 있다.
인간을 모방한 휴머노이드로봇은 기술 발전에 대한 상징성이 매우 크고, 현재 사람들이 생활하고 있는 생활공간에 직접 투입하여 활용할 수 있다는 점에서 개발을 위한 노력이 일본, 미국 등의 선진국들을 중심으로 지속적으로 이뤄지고 있다. 이번 학술대회 개최는 최첨단 국제로봇산업기술교류 증대와 함께 IT기술 강국으로서의 한국 로봇산업이 발전할 수 있는 촉매제 역할을 할 뿐만 아니라, 더 나아가 전 세계의 로봇기술에 이바지 하게 될 것으로 전망된다.
제8회 휴머노이드로봇 학술대회의 대한민국 개최는 우리나라의 로봇기술이 국제적으로 인정받고 있고 있음을 확인한 것이며, 내방하는 해외 전문가들에게 다시한번 우리의 기술을 각인시켜주는 계기가 될 것이다. 행사 기간 중 모든 참석자는 KAIST 휴머노이드로봇 연구센터(소장 오준호 교수)와 인간로봇상호작용연구센터(소장 권동수 교수)를 방문할 예정이다.
2008.11.28 조회수 20310