Design
-
 KAIST Researchers Unveil an AI that Generates "Unexpectedly Original" Designs
< Photo 1. Professor Jaesik Choi, KAIST Kim Jaechul Graduate School of AI >
Recently, text-based image generation models can automatically create high-resolution, high-quality images solely from natural language descriptions. However, when a typical example like the Stable Diffusion model is given the text "creative," its ability to generate truly creative images remains limited. KAIST researchers have developed a technology that can enhance the creativity of text-based image generation models such as Stable Diffusion without additional training, allowing AI to draw creative chair designs that are far from ordinary.
Professor Jaesik Choi's research team at KAIST Kim Jaechul Graduate School of AI, in collaboration with NAVER AI Lab, developed this technology to enhance the creative generation of AI generative models without the need for additional training.
< Photo 2. Gayoung Lee, Researcher at NAVER AI Lab; Dahee Kwon, Ph.D. Candidate at KAIST Kim Jaechul Graduate School of AI; Jiyeon Han, Ph.D. Candidate at KAIST Kim Jaechul Graduate School of AI; Junho Kim, Researcher at NAVER AI Lab >
Professor Choi's research team developed a technology to enhance creative generation by amplifying the internal feature maps of text-based image generation models. They also discovered that shallow blocks within the model play a crucial role in creative generation. They confirmed that amplifying values in the high-frequency region after converting feature maps to the frequency domain can lead to noise or fragmented color patterns. Accordingly, the research team demonstrated that amplifying the low-frequency region of shallow blocks can effectively enhance creative generation.
Considering originality and usefulness as two key elements defining creativity, the research team proposed an algorithm that automatically selects the optimal amplification value for each block within the generative model.
Through the developed algorithm, appropriate amplification of the internal feature maps of a pre-trained Stable Diffusion model was able to enhance creative generation without additional classification data or training.
< Figure 1. Overview of the methodology researched by the development team. After converting the internal feature map of a pre-trained generative model into the frequency domain through Fast Fourier Transform, the low-frequency region of the feature map is amplified, then re-transformed into the feature space via Inverse Fast Fourier Transform to generate an image. >
The research team quantitatively proved, using various metrics, that their developed algorithm can generate images that are more novel than those from existing models, without significantly compromising utility.
In particular, they confirmed an increase in image diversity by mitigating the mode collapse problem that occurs in the SDXL-Turbo model, which was developed to significantly improve the image generation speed of the Stable Diffusion XL (SDXL) model. Furthermore, user studies showed that human evaluation also confirmed a significant improvement in novelty relative to utility compared to existing methods.
Jiyeon Han and Dahee Kwon, Ph.D. candidates at KAIST and co-first authors of the paper, stated, "This is the first methodology to enhance the creative generation of generative models without new training or fine-tuning. We have shown that the latent creativity within trained AI generative models can be enhanced through feature map manipulation."
They added, "This research makes it easy to generate creative images using only text from existing trained models. It is expected to provide new inspiration in various fields, such as creative product design, and contribute to the practical and useful application of AI models in the creative ecosystem."
< Figure 2. Application examples of the methodology researched by the development team. Various Stable Diffusion models generate novel images compared to existing generations while maintaining the meaning of the generated object. >
This research, co-authored by Jiyeon Han and Dahee Kwon, Ph.D. candidates at KAIST Kim Jaechul Graduate School of AI, was presented on June 16 at the International Conference on Computer Vision and Pattern Recognition (CVPR), an international academic conference.* Paper Title: Enhancing Creative Generation on Stable Diffusion-based Models* DOI: https://doi.org/10.48550/arXiv.2503.23538
This research was supported by the KAIST-NAVER Ultra-creative AI Research Center, the Innovation Growth Engine Project Explainable AI, the AI Research Hub Project, and research on flexible evolving AI technology development in line with increasingly strengthened ethical policies, all funded by the Ministry of Science and ICT through the Institute for Information & Communications Technology Promotion. It also received support from the KAIST AI Graduate School Program and was carried out at the KAIST Future Defense AI Specialized Research Center with support from the Defense Acquisition Program Administration and the Agency for Defense Development.
2025.06.20 View 375
KAIST Researchers Unveil an AI that Generates "Unexpectedly Original" Designs
< Photo 1. Professor Jaesik Choi, KAIST Kim Jaechul Graduate School of AI >
Recently, text-based image generation models can automatically create high-resolution, high-quality images solely from natural language descriptions. However, when a typical example like the Stable Diffusion model is given the text "creative," its ability to generate truly creative images remains limited. KAIST researchers have developed a technology that can enhance the creativity of text-based image generation models such as Stable Diffusion without additional training, allowing AI to draw creative chair designs that are far from ordinary.
Professor Jaesik Choi's research team at KAIST Kim Jaechul Graduate School of AI, in collaboration with NAVER AI Lab, developed this technology to enhance the creative generation of AI generative models without the need for additional training.
< Photo 2. Gayoung Lee, Researcher at NAVER AI Lab; Dahee Kwon, Ph.D. Candidate at KAIST Kim Jaechul Graduate School of AI; Jiyeon Han, Ph.D. Candidate at KAIST Kim Jaechul Graduate School of AI; Junho Kim, Researcher at NAVER AI Lab >
Professor Choi's research team developed a technology to enhance creative generation by amplifying the internal feature maps of text-based image generation models. They also discovered that shallow blocks within the model play a crucial role in creative generation. They confirmed that amplifying values in the high-frequency region after converting feature maps to the frequency domain can lead to noise or fragmented color patterns. Accordingly, the research team demonstrated that amplifying the low-frequency region of shallow blocks can effectively enhance creative generation.
Considering originality and usefulness as two key elements defining creativity, the research team proposed an algorithm that automatically selects the optimal amplification value for each block within the generative model.
Through the developed algorithm, appropriate amplification of the internal feature maps of a pre-trained Stable Diffusion model was able to enhance creative generation without additional classification data or training.
< Figure 1. Overview of the methodology researched by the development team. After converting the internal feature map of a pre-trained generative model into the frequency domain through Fast Fourier Transform, the low-frequency region of the feature map is amplified, then re-transformed into the feature space via Inverse Fast Fourier Transform to generate an image. >
The research team quantitatively proved, using various metrics, that their developed algorithm can generate images that are more novel than those from existing models, without significantly compromising utility.
In particular, they confirmed an increase in image diversity by mitigating the mode collapse problem that occurs in the SDXL-Turbo model, which was developed to significantly improve the image generation speed of the Stable Diffusion XL (SDXL) model. Furthermore, user studies showed that human evaluation also confirmed a significant improvement in novelty relative to utility compared to existing methods.
Jiyeon Han and Dahee Kwon, Ph.D. candidates at KAIST and co-first authors of the paper, stated, "This is the first methodology to enhance the creative generation of generative models without new training or fine-tuning. We have shown that the latent creativity within trained AI generative models can be enhanced through feature map manipulation."
They added, "This research makes it easy to generate creative images using only text from existing trained models. It is expected to provide new inspiration in various fields, such as creative product design, and contribute to the practical and useful application of AI models in the creative ecosystem."
< Figure 2. Application examples of the methodology researched by the development team. Various Stable Diffusion models generate novel images compared to existing generations while maintaining the meaning of the generated object. >
This research, co-authored by Jiyeon Han and Dahee Kwon, Ph.D. candidates at KAIST Kim Jaechul Graduate School of AI, was presented on June 16 at the International Conference on Computer Vision and Pattern Recognition (CVPR), an international academic conference.* Paper Title: Enhancing Creative Generation on Stable Diffusion-based Models* DOI: https://doi.org/10.48550/arXiv.2503.23538
This research was supported by the KAIST-NAVER Ultra-creative AI Research Center, the Innovation Growth Engine Project Explainable AI, the AI Research Hub Project, and research on flexible evolving AI technology development in line with increasingly strengthened ethical policies, all funded by the Ministry of Science and ICT through the Institute for Information & Communications Technology Promotion. It also received support from the KAIST AI Graduate School Program and was carried out at the KAIST Future Defense AI Specialized Research Center with support from the Defense Acquisition Program Administration and the Agency for Defense Development.
2025.06.20 View 375 -
 KAIST Professor Jee-Hwan Ryu Receives Global IEEE Robotics Journal Best Paper Award
- Professor Jee-Hwan Ryu of Civil and Environmental Engineering receives the Best Paper Award from the Institute of Electrical and Electronics Engineers (IEEE) Robotics Journal, officially presented at ICRA, a world-renowned robotics conference.
- This is the highest level of international recognition, awarded to only the top 5 papers out of approximately 1,500 published in 2024.
- Securing a new working channel technology for soft growing robots expands the practicality and application possibilities in the field of soft robotics.
< Professor Jee-Hwan Ryu (left), Nam Gyun Kim, Ph.D. Candidate (right) from the KAIST Department of Civil and Environmental Engineering and KAIST Robotics Program >
KAIST (President Kwang-Hyung Lee) announced on the 6th that Professor Jee-Hwan Ryu from the Department of Civil and Environmental Engineering received the 2024 Best Paper Award from the Robotics and Automation Letters (RA-L), a premier journal under the IEEE, at the '2025 IEEE International Conference on Robotics and Automation (ICRA)' held in Atlanta, USA, on May 22nd.
This Best Paper Award is a prestigious honor presented to only the top 5 papers out of approximately 1,500 published in 2024, boasting high international competition and authority.
The award-winning paper by Professor Ryu proposes a novel working channel securing mechanism that significantly expands the practicality and application possibilities of 'Soft Growing Robots,' which are based on soft materials that move or perform tasks through a growing motion similar to plant roots.
< IEEE Robotics Journal Award Ceremony >
Existing soft growing robots move by inflating or contracting their bodies through increasing or decreasing internal pressure, which can lead to blockages in their internal passages. In contrast, the newly developed soft growing robot achieves a growing function while maintaining the internal passage pressure equal to the external atmospheric pressure, thereby successfully securing an internal passage while retaining the robot's flexible and soft characteristics.
This structure allows various materials or tools to be freely delivered through the internal passage (working channel) within the robot and offers the advantage of performing multi-purpose tasks by flexibly replacing equipment according to the working environment.
The research team fabricated a prototype to prove the effectiveness of this technology and verified its performance through various experiments. Specifically, in the slide plate experiment, they confirmed whether materials or equipment could pass through the robot's internal channel without obstruction, and in the pipe pulling experiment, they verified if a long pipe-shaped tool could be pulled through the internal channel.
< Figure 1. Overall hardware structure of the proposed soft growing robot (left) and a cross-sectional view composing the inflatable structure (right) >
Experimental results demonstrated that the internal channel remained stable even while the robot was growing, serving as a key basis for supporting the technology's practicality and scalability.
Professor Jee-Hwan Ryu stated, "This award is very meaningful as it signifies the global recognition of Korea's robotics technology and academic achievements. Especially, it holds great significance in achieving technical progress that can greatly expand the practicality and application fields of soft growing robots. This achievement was possible thanks to the dedication and collaboration of the research team, and I will continue to contribute to the development of robotics technology through innovative research."
< Figure 2. Material supplying mechanism of the Soft Growing Robot >
This research was co-authored by Dongoh Seo, Ph.D. Candidate in Civil and Environmental Engineering, and Nam Gyun Kim, Ph.D. Candidate in Robotics. It was published in IEEE Robotics and Automation Letters on September 1, 2024.
(Paper Title: Inflatable-Structure-Based Working-Channel Securing Mechanism for Soft Growing Robots, DOI: 10.1109/LRA.2024.3426322)
This project was supported simultaneously by the National Research Foundation of Korea's Future Promising Convergence Technology Pioneer Research Project and Mid-career Researcher Project.
2025.06.09 View 1244
KAIST Professor Jee-Hwan Ryu Receives Global IEEE Robotics Journal Best Paper Award
- Professor Jee-Hwan Ryu of Civil and Environmental Engineering receives the Best Paper Award from the Institute of Electrical and Electronics Engineers (IEEE) Robotics Journal, officially presented at ICRA, a world-renowned robotics conference.
- This is the highest level of international recognition, awarded to only the top 5 papers out of approximately 1,500 published in 2024.
- Securing a new working channel technology for soft growing robots expands the practicality and application possibilities in the field of soft robotics.
< Professor Jee-Hwan Ryu (left), Nam Gyun Kim, Ph.D. Candidate (right) from the KAIST Department of Civil and Environmental Engineering and KAIST Robotics Program >
KAIST (President Kwang-Hyung Lee) announced on the 6th that Professor Jee-Hwan Ryu from the Department of Civil and Environmental Engineering received the 2024 Best Paper Award from the Robotics and Automation Letters (RA-L), a premier journal under the IEEE, at the '2025 IEEE International Conference on Robotics and Automation (ICRA)' held in Atlanta, USA, on May 22nd.
This Best Paper Award is a prestigious honor presented to only the top 5 papers out of approximately 1,500 published in 2024, boasting high international competition and authority.
The award-winning paper by Professor Ryu proposes a novel working channel securing mechanism that significantly expands the practicality and application possibilities of 'Soft Growing Robots,' which are based on soft materials that move or perform tasks through a growing motion similar to plant roots.
< IEEE Robotics Journal Award Ceremony >
Existing soft growing robots move by inflating or contracting their bodies through increasing or decreasing internal pressure, which can lead to blockages in their internal passages. In contrast, the newly developed soft growing robot achieves a growing function while maintaining the internal passage pressure equal to the external atmospheric pressure, thereby successfully securing an internal passage while retaining the robot's flexible and soft characteristics.
This structure allows various materials or tools to be freely delivered through the internal passage (working channel) within the robot and offers the advantage of performing multi-purpose tasks by flexibly replacing equipment according to the working environment.
The research team fabricated a prototype to prove the effectiveness of this technology and verified its performance through various experiments. Specifically, in the slide plate experiment, they confirmed whether materials or equipment could pass through the robot's internal channel without obstruction, and in the pipe pulling experiment, they verified if a long pipe-shaped tool could be pulled through the internal channel.
< Figure 1. Overall hardware structure of the proposed soft growing robot (left) and a cross-sectional view composing the inflatable structure (right) >
Experimental results demonstrated that the internal channel remained stable even while the robot was growing, serving as a key basis for supporting the technology's practicality and scalability.
Professor Jee-Hwan Ryu stated, "This award is very meaningful as it signifies the global recognition of Korea's robotics technology and academic achievements. Especially, it holds great significance in achieving technical progress that can greatly expand the practicality and application fields of soft growing robots. This achievement was possible thanks to the dedication and collaboration of the research team, and I will continue to contribute to the development of robotics technology through innovative research."
< Figure 2. Material supplying mechanism of the Soft Growing Robot >
This research was co-authored by Dongoh Seo, Ph.D. Candidate in Civil and Environmental Engineering, and Nam Gyun Kim, Ph.D. Candidate in Robotics. It was published in IEEE Robotics and Automation Letters on September 1, 2024.
(Paper Title: Inflatable-Structure-Based Working-Channel Securing Mechanism for Soft Growing Robots, DOI: 10.1109/LRA.2024.3426322)
This project was supported simultaneously by the National Research Foundation of Korea's Future Promising Convergence Technology Pioneer Research Project and Mid-career Researcher Project.
2025.06.09 View 1244 -
 KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration >
KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020.
KAIST (President Kwang-Hyung Lee) announced this new version of the wearable robot for paraplegic people, WalkON Suit F1, by Professor Kyoungchul Kong (CEO and founder of Angel Robotics) of KAIST Department of Mechanical Engineering on the 24th of October.
< Photo 2. (From left) Professor Kyoungchul Kong of the Department of Mechanical Engineering, Researcher Seunghwan Kim (the competing athlete), and PhD candidate Jeongsu Park (the leader of Team KAIST) >
WalkON Suit is a wearable robot for people suffering with paraplegic disabilities that the research team has been continuously researching since 2015. This robot targets to assist persons with American Spinal Injury Association (ASIA) Impairment Scale – A (complete paralysis) grade injury, the most severe level of paraplegia. Therefore, its development purpose is different from that of other rehabilitation therapy and muscle strength assisting robots currently being supplied nationally by Angel Robotics.
Professor Kong's research team first announced WalkON Suit 1 in 2016, and then introduced WalkON Suit 4 in 2020, increasing the walking speed to 3.2 km/h, achieving the normal walking speed of people with no disabilities. In addition, it demonstrated the ability to pass through obstacles such as narrow passages, doors, and stairs that can be encountered in daily life.
However, it had the same fundamental problem all wearable robots have, which is that they require the help of others to wear the robot. While you can walk without help from others once you are wearing the robot, you needed someone's help to put it on to begin with.
The newly released WalkON Suit F1 presented a technical solution to this fundamental problem. It applied a frontal-docking method instead of a rear-sitting method so that you can wear the robot right away without getting out of the wheelchair and into the robot, which would require help from others mid-transition.
< Photo 3. WalkON Suit F1 - suiting-up demonstration >
In addition, before wearing the robot, it can walk on its own like a humanoid robot and approaches the user. It is also implemented a function that actively controls the center of its weight against the pull of gravity so that it maintains balance without falling over even if the user pushes the robot otherwise. The outer design of the WalkON Suit F1, which crosses between a humanoid and a wearable robot, was done by Professor Hyunjoon Park of the Department of Industrial Design at KAIST.
The original function of the wearable robot has also been greatly improved. The performance of the balance control was improved to allow the free use of both hands in upright state, as well as the freedom to take several steps without a cane.
Technological advancements at the components level are also noteworthy. Through close collaboration with Angel Robotics, all core components of the robot, such as the motor, reducer, motor driver, and main circuit, have been domestically produced. The output density of the motor and reducer modules has been improved by about two folds (based on power per weight) compared to the research team's existing technology, and the control performance of the motor driver has been improved by about three times (based on frequency response speed) compared to the best overseas technology.
In particular, the embedded software technology of the motor driver has been significantly improved so that advanced motion control algorithms can be stably implemented without using expensive higher-level controllers. In addition, visual recognition system for obstacle detection and an AI board for neural network application have been installed.
< Figure 1. WalkON Suit F1 shape and main specifications >
Professor Kong explained, “WalkON Suit is the culmination of wearable robot technology for the disabled,” and added, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.”
Professor Kong’s research team revealed WalkON Suit F1 and announced that they will be participating in the 3rd Cybathlon, which is being held after four years since the last event. In this competition, which will be held on October 27, Professor Kong’s lab, the Exo Lab will be participating with Jeongsu Park, a Ph.D. Student, as the leader and Seunghwan Kim, the lab’s staff researcher with complete paralysis, as the competing athlete.
The difficulty of the missions in this competition has been significantly increased compared to the previous competition, and the number of missions has increased from six to ten. Some missions have been criticized for being overly challenging, going beyond the level that can be encountered in everyday life.
< Photo 4. Cybathlon stadium (Angel Robotics Asia Hub) >
Regarding this, the team leader Jeongsu Park expressed his ambition, saying, “Since we already won first place in the previous competition, our goal in this competition is to show the technological gap rather than competing for rankings.”
The Cybathlon is a cyborg Olympics held every four years in Switzerland. This competition will be held in a hybrid format, with some participants taking part in Switzerland while others broadcasting live from stadiums in their own country on October 27. Professor Kong's research team will be participating via live broadcast from the competition facilities installed in Angel Robotics' Advanced Research Institute (Planet Daejeon).
< Photo 5. Photo of Team KAIST participating in Cybathlon 2024 >
The demonstration video of WalkON Suit F1 can be viewed through the link below.
Link: https://www.youtube.com/@KyoungchulKong_EXO-Lab
2024.10.24 View 12258
KAIST Introduces a Wearable Robot that Walks and Puts itself on to Disabled Persons
< Photo 1. WalkON Suit F1 - walking demonstration >
KAIST researchers have unveiled a new wearable robot developed for completely paralyzed persons that can walk to them so that the user can wear it right out of their wheelchairs without the help from others. Also, it was announced that Professor Kyoungchul Kong's team from KAIST will be participating in the wearable robot category of the 3rd Cybathlon, which is being held four years after the team’s gold medal win in 2020.
KAIST (President Kwang-Hyung Lee) announced this new version of the wearable robot for paraplegic people, WalkON Suit F1, by Professor Kyoungchul Kong (CEO and founder of Angel Robotics) of KAIST Department of Mechanical Engineering on the 24th of October.
< Photo 2. (From left) Professor Kyoungchul Kong of the Department of Mechanical Engineering, Researcher Seunghwan Kim (the competing athlete), and PhD candidate Jeongsu Park (the leader of Team KAIST) >
WalkON Suit is a wearable robot for people suffering with paraplegic disabilities that the research team has been continuously researching since 2015. This robot targets to assist persons with American Spinal Injury Association (ASIA) Impairment Scale – A (complete paralysis) grade injury, the most severe level of paraplegia. Therefore, its development purpose is different from that of other rehabilitation therapy and muscle strength assisting robots currently being supplied nationally by Angel Robotics.
Professor Kong's research team first announced WalkON Suit 1 in 2016, and then introduced WalkON Suit 4 in 2020, increasing the walking speed to 3.2 km/h, achieving the normal walking speed of people with no disabilities. In addition, it demonstrated the ability to pass through obstacles such as narrow passages, doors, and stairs that can be encountered in daily life.
However, it had the same fundamental problem all wearable robots have, which is that they require the help of others to wear the robot. While you can walk without help from others once you are wearing the robot, you needed someone's help to put it on to begin with.
The newly released WalkON Suit F1 presented a technical solution to this fundamental problem. It applied a frontal-docking method instead of a rear-sitting method so that you can wear the robot right away without getting out of the wheelchair and into the robot, which would require help from others mid-transition.
< Photo 3. WalkON Suit F1 - suiting-up demonstration >
In addition, before wearing the robot, it can walk on its own like a humanoid robot and approaches the user. It is also implemented a function that actively controls the center of its weight against the pull of gravity so that it maintains balance without falling over even if the user pushes the robot otherwise. The outer design of the WalkON Suit F1, which crosses between a humanoid and a wearable robot, was done by Professor Hyunjoon Park of the Department of Industrial Design at KAIST.
The original function of the wearable robot has also been greatly improved. The performance of the balance control was improved to allow the free use of both hands in upright state, as well as the freedom to take several steps without a cane.
Technological advancements at the components level are also noteworthy. Through close collaboration with Angel Robotics, all core components of the robot, such as the motor, reducer, motor driver, and main circuit, have been domestically produced. The output density of the motor and reducer modules has been improved by about two folds (based on power per weight) compared to the research team's existing technology, and the control performance of the motor driver has been improved by about three times (based on frequency response speed) compared to the best overseas technology.
In particular, the embedded software technology of the motor driver has been significantly improved so that advanced motion control algorithms can be stably implemented without using expensive higher-level controllers. In addition, visual recognition system for obstacle detection and an AI board for neural network application have been installed.
< Figure 1. WalkON Suit F1 shape and main specifications >
Professor Kong explained, “WalkON Suit is the culmination of wearable robot technology for the disabled,” and added, “The numerous components, control, and module technologies derived from WalkON Suit are setting the standard for the entire wearable robot industry.”
Professor Kong’s research team revealed WalkON Suit F1 and announced that they will be participating in the 3rd Cybathlon, which is being held after four years since the last event. In this competition, which will be held on October 27, Professor Kong’s lab, the Exo Lab will be participating with Jeongsu Park, a Ph.D. Student, as the leader and Seunghwan Kim, the lab’s staff researcher with complete paralysis, as the competing athlete.
The difficulty of the missions in this competition has been significantly increased compared to the previous competition, and the number of missions has increased from six to ten. Some missions have been criticized for being overly challenging, going beyond the level that can be encountered in everyday life.
< Photo 4. Cybathlon stadium (Angel Robotics Asia Hub) >
Regarding this, the team leader Jeongsu Park expressed his ambition, saying, “Since we already won first place in the previous competition, our goal in this competition is to show the technological gap rather than competing for rankings.”
The Cybathlon is a cyborg Olympics held every four years in Switzerland. This competition will be held in a hybrid format, with some participants taking part in Switzerland while others broadcasting live from stadiums in their own country on October 27. Professor Kong's research team will be participating via live broadcast from the competition facilities installed in Angel Robotics' Advanced Research Institute (Planet Daejeon).
< Photo 5. Photo of Team KAIST participating in Cybathlon 2024 >
The demonstration video of WalkON Suit F1 can be viewed through the link below.
Link: https://www.youtube.com/@KyoungchulKong_EXO-Lab
2024.10.24 View 12258 -
 KAIST Professor Jiyun Lee becomes the first Korean to receive the Thurlow Award from the American Institute of Navigation
< Distinguished Professor Jiyun Lee from the KAIST Department of Aerospace Engineering >
KAIST (President Kwang-Hyung Lee) announced on January 27th that Distinguished Professor Jiyun Lee from the KAIST Department of Aerospace Engineering had won the Colonel Thomas L. Thurlow Award from the American Institute of Navigation (ION) for her achievements in the field of satellite navigation.
The American Institute of Navigation (ION) announced Distinguished Professor Lee as the winner of the Thurlow Award at its annual awards ceremony held in conjunction with its international conference in Long Beach, California on January 25th. This is the first time a person of Korean descent has received the award.
The Thurlow Award was established in 1945 to honor Colonel Thomas L. Thurlow, who made significant contributions to the development of navigation equipment and the training of navigators. This award aims to recognize an individual who has made an outstanding contribution to the development of navigation and it is awarded to one person each year. Past recipients include MIT professor Charles Stark Draper, who is well-known as the father of inertial navigation and who developed the guidance computer for the Apollo moon landing project.
Distinguished Professor Jiyun Lee was recognized for her significant contributions to technological advancements that ensure the safety of satellite-based navigation systems for aviation. In particular, she was recognized as a world authority in the field of navigation integrity architecture design, which is essential for ensuring the stability of intelligent transportation systems and autonomous unmanned systems. Distinguished Professor Lee made a groundbreaking contribution to help ensure the safety of satellite-based navigation systems from ionospheric disturbances, including those affected by sudden changes in external factors such as the solar and space environment.
She has achieved numerous scientific discoveries in the field of ionospheric research, while developing new ionospheric threat modeling methods, ionospheric anomaly monitoring and mitigation techniques, and integrity and availability assessment techniques for next-generation augmented navigation systems. She also contributed to the international standardization of technology through the International Civil Aviation Organization (ICAO).
Distinguished Professor Lee and her research group have pioneered innovative navigation technologies for the safe and autonomous operation of unmanned aerial vehicles (UAVs) and urban air mobility (UAM). She was the first to propose and develop a low-cost navigation satellite system (GNSS) augmented architecture for UAVs with a near-field network operation concept that ensures high integrity, and a networked ground station-based augmented navigation system for UAM. She also contributed to integrity design techniques, including failure monitoring and integrity risk assessment for multi-sensor integrated navigation systems.
< Professor Jiyoon Lee upon receiving the Thurlow Award >
Bradford Parkinson, professor emeritus at Stanford University and winner of the 1986 Thurlow Award, who is known as the father of GPS, congratulated Distinguished Professor Lee upon hearing that she was receiving the Thurlow Award and commented that her innovative research has addressed many important topics in the field of navigation and her solutions are highly innovative and highly regarded.
Distinguished Professor Lee said, “I am very honored and delighted to receive this award with its deep history and tradition in the field of navigation.” She added, “I will strive to help develop the future mobility industry by securing safe and sustainable navigation technology.”
2024.01.26 View 7353
KAIST Professor Jiyun Lee becomes the first Korean to receive the Thurlow Award from the American Institute of Navigation
< Distinguished Professor Jiyun Lee from the KAIST Department of Aerospace Engineering >
KAIST (President Kwang-Hyung Lee) announced on January 27th that Distinguished Professor Jiyun Lee from the KAIST Department of Aerospace Engineering had won the Colonel Thomas L. Thurlow Award from the American Institute of Navigation (ION) for her achievements in the field of satellite navigation.
The American Institute of Navigation (ION) announced Distinguished Professor Lee as the winner of the Thurlow Award at its annual awards ceremony held in conjunction with its international conference in Long Beach, California on January 25th. This is the first time a person of Korean descent has received the award.
The Thurlow Award was established in 1945 to honor Colonel Thomas L. Thurlow, who made significant contributions to the development of navigation equipment and the training of navigators. This award aims to recognize an individual who has made an outstanding contribution to the development of navigation and it is awarded to one person each year. Past recipients include MIT professor Charles Stark Draper, who is well-known as the father of inertial navigation and who developed the guidance computer for the Apollo moon landing project.
Distinguished Professor Jiyun Lee was recognized for her significant contributions to technological advancements that ensure the safety of satellite-based navigation systems for aviation. In particular, she was recognized as a world authority in the field of navigation integrity architecture design, which is essential for ensuring the stability of intelligent transportation systems and autonomous unmanned systems. Distinguished Professor Lee made a groundbreaking contribution to help ensure the safety of satellite-based navigation systems from ionospheric disturbances, including those affected by sudden changes in external factors such as the solar and space environment.
She has achieved numerous scientific discoveries in the field of ionospheric research, while developing new ionospheric threat modeling methods, ionospheric anomaly monitoring and mitigation techniques, and integrity and availability assessment techniques for next-generation augmented navigation systems. She also contributed to the international standardization of technology through the International Civil Aviation Organization (ICAO).
Distinguished Professor Lee and her research group have pioneered innovative navigation technologies for the safe and autonomous operation of unmanned aerial vehicles (UAVs) and urban air mobility (UAM). She was the first to propose and develop a low-cost navigation satellite system (GNSS) augmented architecture for UAVs with a near-field network operation concept that ensures high integrity, and a networked ground station-based augmented navigation system for UAM. She also contributed to integrity design techniques, including failure monitoring and integrity risk assessment for multi-sensor integrated navigation systems.
< Professor Jiyoon Lee upon receiving the Thurlow Award >
Bradford Parkinson, professor emeritus at Stanford University and winner of the 1986 Thurlow Award, who is known as the father of GPS, congratulated Distinguished Professor Lee upon hearing that she was receiving the Thurlow Award and commented that her innovative research has addressed many important topics in the field of navigation and her solutions are highly innovative and highly regarded.
Distinguished Professor Lee said, “I am very honored and delighted to receive this award with its deep history and tradition in the field of navigation.” She added, “I will strive to help develop the future mobility industry by securing safe and sustainable navigation technology.”
2024.01.26 View 7353 -
 KAIST Civil Engineering Students named Runner-up at the 2023 ULI Hines Student Competition - Asia Pacific
A team of five students from the Korea Advanced Institute of Science and Technology (KAIST) were awarded second place in a premier urban design student competition hosted by the Urban Land Institute and Hines, 2023 ULI Hines Student Competition - Asia Pacific.
The competition, which was held for the first time in the Asia-Pacific region, is an internationally recognized event which typically attract hundreds of applicants.
Jonah Remigio, Sojung Noh, Estefania Rodriguez, Jihyun Kang, and Ayantu Teshome, who joined forces under the name of “Team Hashtag Development”, were supported by faculty advisors Dr. Albert Han and Dr. Youngchul Kim of the Department of Civil and Environmental Engineering to imagine a more sustainable and enriched way of living in the Jurong district of Singapore.
Their submission, titled “Proposal: The Nest”, analyzed the big data within Singapore, using the data to determine which real estate business strategies would best enhance the quality of living and economy of the region.
Their final design, "The Nest" utilized mixed-use zoning to integrate the site’s scenic waterfront with homes, medical innovation, and sustainable technology, altogether creating a place to innovate, inhabit, and immerse.
< The Nest by Team Hashtag Development (Jonah Remigio, Ayantu Teshome Mossisa, Estefania Ayelen Rodriguez del Puerto, Sojung Noh, Jihyun Kang) ©2023 Urban Land Institute >
Ultimately, the team was recognized for their hard work and determination, imprinting South Korea’s indelible footprint in the arena of international scholastic achievement as they were named to be one of the Finalists on April 13th.
< Members of Team Hashtag Development >
Team Hashtag Development gave a virtual presentation to a jury of six ULI members on April 20th along with the "Team The REAL" from the University of Economics Ho Chi Minh City of Vietnam and "Team Omusubi" from the Waseda University of Japan, the team that submitted the proposal "Jurong Urban Health Campus" which was announced to be the winner on the 31st of May, after the virtual briefing by the top three finalists.
2023.06.26 View 8957
KAIST Civil Engineering Students named Runner-up at the 2023 ULI Hines Student Competition - Asia Pacific
A team of five students from the Korea Advanced Institute of Science and Technology (KAIST) were awarded second place in a premier urban design student competition hosted by the Urban Land Institute and Hines, 2023 ULI Hines Student Competition - Asia Pacific.
The competition, which was held for the first time in the Asia-Pacific region, is an internationally recognized event which typically attract hundreds of applicants.
Jonah Remigio, Sojung Noh, Estefania Rodriguez, Jihyun Kang, and Ayantu Teshome, who joined forces under the name of “Team Hashtag Development”, were supported by faculty advisors Dr. Albert Han and Dr. Youngchul Kim of the Department of Civil and Environmental Engineering to imagine a more sustainable and enriched way of living in the Jurong district of Singapore.
Their submission, titled “Proposal: The Nest”, analyzed the big data within Singapore, using the data to determine which real estate business strategies would best enhance the quality of living and economy of the region.
Their final design, "The Nest" utilized mixed-use zoning to integrate the site’s scenic waterfront with homes, medical innovation, and sustainable technology, altogether creating a place to innovate, inhabit, and immerse.
< The Nest by Team Hashtag Development (Jonah Remigio, Ayantu Teshome Mossisa, Estefania Ayelen Rodriguez del Puerto, Sojung Noh, Jihyun Kang) ©2023 Urban Land Institute >
Ultimately, the team was recognized for their hard work and determination, imprinting South Korea’s indelible footprint in the arena of international scholastic achievement as they were named to be one of the Finalists on April 13th.
< Members of Team Hashtag Development >
Team Hashtag Development gave a virtual presentation to a jury of six ULI members on April 20th along with the "Team The REAL" from the University of Economics Ho Chi Minh City of Vietnam and "Team Omusubi" from the Waseda University of Japan, the team that submitted the proposal "Jurong Urban Health Campus" which was announced to be the winner on the 31st of May, after the virtual briefing by the top three finalists.
2023.06.26 View 8957 -
 MVITRO Co., Ltd. Signs to Donate KRW 1 Billion as Development Fund toward KAIST-NYU Joint Campus
KAIST (President Kwang Hyung Lee) announced on the 29th that it has solicited a development fund of KRW 1 billion from MVITRO (CEO Young Woo Lee) for joint research at the KAIST-NYU Joint Campus, which is being pursued to be KAIST's first campus on the United States.
KAIST plans to use this development fund for research and development of various solutions in the field of 'Healthcare at Home' among several joint researches being conducted with New York University (hereinafter referred to as NYU).
Young Woo Lee, the CEO of MVITRO, said, "We decided to make the donation with the hope that the KAIST-NYU Joint Campus will become an ecosystem that would help with Korean companies’ advancement into the US."
After announcing its plans to enter New York in 2021, KAIST has formed partnerships with NYU and New York City last year. Currently, NYU and KAIST are devising plans for mid- to long-term joint research in nine fields of studies including AI and bio-medicine and technology, and are promoting cooperation in the field of education, including exchange students, minors, double majors, and joint degrees under the joint campus agreement,
The ceremony for the consigning of MVITRO Co., Ltd.’s donation was held at the main campus of KAIST in the afternoon of the 29th and was attended by KAIST officials such as President Kwang Hyung Lee and Jae-Hung Han, the executive director of KAIST Development Foundation, along with the NYU President-Designate Linda G. Mills, and the CEO of MVITRO, Young Woo Lee.
< Photo. (from left) Kwang Hyung Lee, the President of KAIST, Linda G. Mills, the President-Designate of NYU, and Young Woo Lee, the CEO of MVITRO, pose for the photo with the signed letter of donation on May 29, 2023 at KAIST >
Linda Mills, the nominee designated to be NYU president next term said, “I am proud to join our colleagues in celebrating this important gift from MVITRO, which will help support the partnership between KAIST and NYU. This global partnership leverages the distinctive strengths of both universities to drive advances in research poised to deliver profound impact, such as the intersections of healthcare, technology, and AI."
President Kwang Hyung Lee said, "The KAIST-NYU Joint Campus will be the first step in extending KAIST's excellent science and technology capabilities to the international stage and will serve as a bridgehead to help excellent technological advancements venture into the United States." Then, President Lee added, "I would like to express my gratitude to MVITRO for sympathizing with this vision. I will work with NYU to lead the creation of global values.”
On a different note, MVITRO Co., Ltd., is a home medical device maker that collaborated with Hyundai Futurenet Co., Ltd. to develop an IoT product that combined a painless laser lancet (blood collector) and a blood glucose meter into one for a convenient at-home health support, which received favorable reviews from overseas buyers at CES 2023.
2023.05.30 View 10176
MVITRO Co., Ltd. Signs to Donate KRW 1 Billion as Development Fund toward KAIST-NYU Joint Campus
KAIST (President Kwang Hyung Lee) announced on the 29th that it has solicited a development fund of KRW 1 billion from MVITRO (CEO Young Woo Lee) for joint research at the KAIST-NYU Joint Campus, which is being pursued to be KAIST's first campus on the United States.
KAIST plans to use this development fund for research and development of various solutions in the field of 'Healthcare at Home' among several joint researches being conducted with New York University (hereinafter referred to as NYU).
Young Woo Lee, the CEO of MVITRO, said, "We decided to make the donation with the hope that the KAIST-NYU Joint Campus will become an ecosystem that would help with Korean companies’ advancement into the US."
After announcing its plans to enter New York in 2021, KAIST has formed partnerships with NYU and New York City last year. Currently, NYU and KAIST are devising plans for mid- to long-term joint research in nine fields of studies including AI and bio-medicine and technology, and are promoting cooperation in the field of education, including exchange students, minors, double majors, and joint degrees under the joint campus agreement,
The ceremony for the consigning of MVITRO Co., Ltd.’s donation was held at the main campus of KAIST in the afternoon of the 29th and was attended by KAIST officials such as President Kwang Hyung Lee and Jae-Hung Han, the executive director of KAIST Development Foundation, along with the NYU President-Designate Linda G. Mills, and the CEO of MVITRO, Young Woo Lee.
< Photo. (from left) Kwang Hyung Lee, the President of KAIST, Linda G. Mills, the President-Designate of NYU, and Young Woo Lee, the CEO of MVITRO, pose for the photo with the signed letter of donation on May 29, 2023 at KAIST >
Linda Mills, the nominee designated to be NYU president next term said, “I am proud to join our colleagues in celebrating this important gift from MVITRO, which will help support the partnership between KAIST and NYU. This global partnership leverages the distinctive strengths of both universities to drive advances in research poised to deliver profound impact, such as the intersections of healthcare, technology, and AI."
President Kwang Hyung Lee said, "The KAIST-NYU Joint Campus will be the first step in extending KAIST's excellent science and technology capabilities to the international stage and will serve as a bridgehead to help excellent technological advancements venture into the United States." Then, President Lee added, "I would like to express my gratitude to MVITRO for sympathizing with this vision. I will work with NYU to lead the creation of global values.”
On a different note, MVITRO Co., Ltd., is a home medical device maker that collaborated with Hyundai Futurenet Co., Ltd. to develop an IoT product that combined a painless laser lancet (blood collector) and a blood glucose meter into one for a convenient at-home health support, which received favorable reviews from overseas buyers at CES 2023.
2023.05.30 View 10176 -
 “3D sketch” Your Ideas and Bring Them to Life, Instantly!
Professor Seok-Hyung Bae’s research team at the Department of Industrial Design developed a novel 3D sketching system that rapidly creates animated 3D concepts through simple user interactions like sketching on a piece of paper or playing a toy.
Foldable drones, transforming vehicles, and multi-legged robots from sci-fi movies are now becoming commonplace thanks to technological progress. However, designing them remains a difficult challenge even for skilled experts, because complex design decisions must be made regarding not only their form, but also the structure, poses, and motions, which are interdependent on one another.
Creating a 3D concept comprising of multiple moving parts connected by different types of joints using a traditional 3D CAD tool, which is more suited for processing precise and elaborate modeling, is a painstaking and time-consuming process. This presents a major bottleneck for the workflow during the early stage of design, in which it is preferred that as many ideas are tried and discarded out as quickly as possible in order to explore a wide range of possibilities in the shortest amount of time.
A research team led by Professor Bae has focused on designers’ freehand sketches drew up with a pen on a paper that serve as the starting point for virtually all design projects. This led them to develop their 3D sketching technology to generate desired 3D curves from the rough but expressive 2D strokes drawn with a digital stylus on a digital tablet.
Their latest research helps designers bring their 3D sketches to life almost instantly. Using the intuitive set of multi-touch gestures the team successfully designed and implemented, designers can handle the 3D sketches they are working on with their fingers as if they are playing with toys and put them into animation in no time.
< Figure 1. A novel 3D sketching system for rapidly designing articulated 3D concepts with a small set of coherent pen and multi-touch gestures. (a) Sketching: A 3D sketch curve is created by marking a pen stroke that is projected onto a sketch plane widget. (b) Segmenting: Entire or partial sketch curves are added to separate parts that serve as links in the kinematic chain. (c) Rigging: Repeatedly demonstrating the desired motion of a part leaves behind a trail, from which the system infers a joint. (d) Posing: Desired poses can be achieved through actuating joints via forward or inverse kinematics. (e) Filming: A sequence of keyframes specifying desired poses and viewpoints is connected as a smooth motion. >
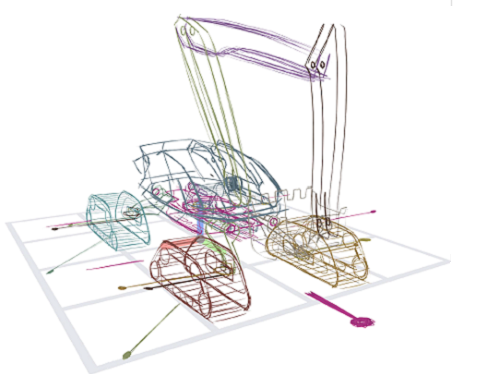
< Figure 2. (a) Concept drawing of an autonomous excavator. It features (b, c) four caterpillars that swivel for high maneuverability, (d) an extendable boom and a bucket connected by multiple links, and (e) a rotating platform. The concept’s designer, who had 8 years of work experience, estimated that it would take 1-2 weeks to express and communicate such a complex articulated object with existing tools. With the proposed system, it took only 2 hours and 52 minutes. >
The major findings of their work were published under the title “Rapid Design of Articulated Objects” in ACM Transactions on Graphics (impact factor: 7.403), the top international journal in the field of computer graphics, and presented at ACM SIGGRAPH 2022 (h5-index: 103), the world’s largest international academic conference in the field, which was held back in August in Vancouver, Canada with Joon Hyub Lee, a Ph.D. student of the Department of Industrial Design as the first author.
The ACM SIGGRAPH 2022 conference was reportedly attended by over 10,000 participants including researchers, artists, and developers from world-renowned universities; film, animation, and game studies, such as Marvel, Pixar, and Blizzard; high-tech manufacturers, such as Lockheed Martin and Boston Dynamics; and metaverse platform companies, such as Meta and Roblox.
< Figure 3. The findings of Professor Bae’s research team were published in ACM Transactions on Graphics, the top international academic journal in the field of computer graphics, and presented at ACM SIGGRAPH 2022, the largest international academic conference held in conjunction early August in Vancouver, Canada. The team’s live demo at the Emerging Technologies program was highly praised by numerous academics and industry officials and received an Honorable Mention. >
The team was also invited to present their technical paper as a demo and a special talk at the Emerging Technologies program at ACM SIGGRAPH 2022 as one of the top-three impactful technologies. The live performance, in which Hanbit Kim, a Ph.D. student of the Department of Industrial Design at KAIST and a co-author, sketched and animated a sophisticated animal-shaped robot from scratch in a matter of a few minutes, wowed the audience and won the Honorable Mention Award from the jury.
Edwin Catmull, the co-founder of Pixar and a keynote speaker at the SIGGRAPH conference, praised the team’s research on 3D sketching as “really excellent work” and “a kind of tool that would be useful to Pixar's creative model designers.”
This technology, which became virally popular in Japan after featuring in an online IT media outlet and attracting more than 600K views, received a special award from the Digital Content Association of Japan (DCAJ) and was invited and exhibited for three days at Tokyo in November, as a part of Inter BEE 2022, the largest broadcasting and media expo in Japan.
“The more we come to understand how designers think and work, the more effective design tools can be built around that understanding,” said Professor Bae, explaining that “the key is to integrate different algorithms into a harmonious system as intuitive interactions.” He added that “this work wouldn’t have been possible if it weren’t for the convergent research environment cultivated by the Department of Industrial Design at KAIST, in which all students see themselves not only as aspiring creative designers, but also as practical engineers.”
By enabling designers to produce highly expressive animated 3D concepts far more quickly and easily in comparison to using existing methods, this new tool is expected to revolutionize design practices and processes in the content creation, manufacturing, and metaverse-related industries.
This research was funded by the Ministry of Science and ICT, and the National Research Foundation of Korea.
More info: https://sketch.kaist.ac.kr/publications/2022_siggraph_rapid_design
Video: https://www.youtube.com/watch?v=rsBl0QvSDqI
< Figure 4. From left to right: Ph.D. students Hanbit Kim, and Joon Hyub Lee and Professor Bae of the Department of Industrial Design, KAIST >
2022.11.23 View 11378
“3D sketch” Your Ideas and Bring Them to Life, Instantly!
Professor Seok-Hyung Bae’s research team at the Department of Industrial Design developed a novel 3D sketching system that rapidly creates animated 3D concepts through simple user interactions like sketching on a piece of paper or playing a toy.
Foldable drones, transforming vehicles, and multi-legged robots from sci-fi movies are now becoming commonplace thanks to technological progress. However, designing them remains a difficult challenge even for skilled experts, because complex design decisions must be made regarding not only their form, but also the structure, poses, and motions, which are interdependent on one another.
Creating a 3D concept comprising of multiple moving parts connected by different types of joints using a traditional 3D CAD tool, which is more suited for processing precise and elaborate modeling, is a painstaking and time-consuming process. This presents a major bottleneck for the workflow during the early stage of design, in which it is preferred that as many ideas are tried and discarded out as quickly as possible in order to explore a wide range of possibilities in the shortest amount of time.
A research team led by Professor Bae has focused on designers’ freehand sketches drew up with a pen on a paper that serve as the starting point for virtually all design projects. This led them to develop their 3D sketching technology to generate desired 3D curves from the rough but expressive 2D strokes drawn with a digital stylus on a digital tablet.
Their latest research helps designers bring their 3D sketches to life almost instantly. Using the intuitive set of multi-touch gestures the team successfully designed and implemented, designers can handle the 3D sketches they are working on with their fingers as if they are playing with toys and put them into animation in no time.
< Figure 1. A novel 3D sketching system for rapidly designing articulated 3D concepts with a small set of coherent pen and multi-touch gestures. (a) Sketching: A 3D sketch curve is created by marking a pen stroke that is projected onto a sketch plane widget. (b) Segmenting: Entire or partial sketch curves are added to separate parts that serve as links in the kinematic chain. (c) Rigging: Repeatedly demonstrating the desired motion of a part leaves behind a trail, from which the system infers a joint. (d) Posing: Desired poses can be achieved through actuating joints via forward or inverse kinematics. (e) Filming: A sequence of keyframes specifying desired poses and viewpoints is connected as a smooth motion. >
< Figure 2. (a) Concept drawing of an autonomous excavator. It features (b, c) four caterpillars that swivel for high maneuverability, (d) an extendable boom and a bucket connected by multiple links, and (e) a rotating platform. The concept’s designer, who had 8 years of work experience, estimated that it would take 1-2 weeks to express and communicate such a complex articulated object with existing tools. With the proposed system, it took only 2 hours and 52 minutes. >
The major findings of their work were published under the title “Rapid Design of Articulated Objects” in ACM Transactions on Graphics (impact factor: 7.403), the top international journal in the field of computer graphics, and presented at ACM SIGGRAPH 2022 (h5-index: 103), the world’s largest international academic conference in the field, which was held back in August in Vancouver, Canada with Joon Hyub Lee, a Ph.D. student of the Department of Industrial Design as the first author.
The ACM SIGGRAPH 2022 conference was reportedly attended by over 10,000 participants including researchers, artists, and developers from world-renowned universities; film, animation, and game studies, such as Marvel, Pixar, and Blizzard; high-tech manufacturers, such as Lockheed Martin and Boston Dynamics; and metaverse platform companies, such as Meta and Roblox.
< Figure 3. The findings of Professor Bae’s research team were published in ACM Transactions on Graphics, the top international academic journal in the field of computer graphics, and presented at ACM SIGGRAPH 2022, the largest international academic conference held in conjunction early August in Vancouver, Canada. The team’s live demo at the Emerging Technologies program was highly praised by numerous academics and industry officials and received an Honorable Mention. >
The team was also invited to present their technical paper as a demo and a special talk at the Emerging Technologies program at ACM SIGGRAPH 2022 as one of the top-three impactful technologies. The live performance, in which Hanbit Kim, a Ph.D. student of the Department of Industrial Design at KAIST and a co-author, sketched and animated a sophisticated animal-shaped robot from scratch in a matter of a few minutes, wowed the audience and won the Honorable Mention Award from the jury.
Edwin Catmull, the co-founder of Pixar and a keynote speaker at the SIGGRAPH conference, praised the team’s research on 3D sketching as “really excellent work” and “a kind of tool that would be useful to Pixar's creative model designers.”
This technology, which became virally popular in Japan after featuring in an online IT media outlet and attracting more than 600K views, received a special award from the Digital Content Association of Japan (DCAJ) and was invited and exhibited for three days at Tokyo in November, as a part of Inter BEE 2022, the largest broadcasting and media expo in Japan.
“The more we come to understand how designers think and work, the more effective design tools can be built around that understanding,” said Professor Bae, explaining that “the key is to integrate different algorithms into a harmonious system as intuitive interactions.” He added that “this work wouldn’t have been possible if it weren’t for the convergent research environment cultivated by the Department of Industrial Design at KAIST, in which all students see themselves not only as aspiring creative designers, but also as practical engineers.”
By enabling designers to produce highly expressive animated 3D concepts far more quickly and easily in comparison to using existing methods, this new tool is expected to revolutionize design practices and processes in the content creation, manufacturing, and metaverse-related industries.
This research was funded by the Ministry of Science and ICT, and the National Research Foundation of Korea.
More info: https://sketch.kaist.ac.kr/publications/2022_siggraph_rapid_design
Video: https://www.youtube.com/watch?v=rsBl0QvSDqI
< Figure 4. From left to right: Ph.D. students Hanbit Kim, and Joon Hyub Lee and Professor Bae of the Department of Industrial Design, KAIST >
2022.11.23 View 11378 -
 Interactive Map of Metabolical Synthesis of Chemicals
An interactive map that compiled the chemicals produced by biological, chemical and combined reactions has been distributed on the web
- A team led by Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering, organized and distributed an all-inclusive listing of chemical substances that can be synthesized using microorganisms
- It is expected to be used by researchers around the world as it enables easy assessment of the synthetic pathway through the web.
A research team comprised of Woo Dae Jang, Gi Bae Kim, and Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering at KAIST reported an interactive metabolic map of bio-based chemicals. Their research paper “An interactive metabolic map of bio-based chemicals” was published online in Trends in Biotechnology on August 10, 2022.
As a response to rapid climate change and environmental pollution, research on the production of petrochemical products using microorganisms is receiving attention as a sustainable alternative to existing methods of productions. In order to synthesize various chemical substances, materials, and fuel using microorganisms, it is necessary to first construct the biosynthetic pathway toward desired product by exploration and discovery and introduce them into microorganisms. In addition, in order to efficiently synthesize various chemical substances, it is sometimes necessary to employ chemical methods along with bioengineering methods using microorganisms at the same time. For the production of non-native chemicals, novel pathways are designed by recruiting enzymes from heterologous sources or employing enzymes designed though rational engineering, directed evolution, or ab initio design.
The research team had completed a map of chemicals which compiled all available pathways of biological and/or chemical reactions that lead to the production of various bio-based chemicals back in 2019 and published the map in Nature Catalysis. The map was distributed in the form of a poster to industries and academia so that the synthesis paths of bio-based chemicals could be checked at a glance.
The research team has expanded the bio-based chemicals map this time in the form of an interactive map on the web so that anyone with internet access can quickly explore efficient paths to synthesize desired products. The web-based map provides interactive visual tools to allow interactive visualization, exploration, and analysis of complex networks of biological and/or chemical reactions toward the desired products. In addition, the reported paper also discusses the production of natural compounds that are used for diverse purposes such as food and medicine, which will help designing novel pathways through similar approaches or by exploiting the promiscuity of enzymes described in the map. The published bio-based chemicals map is also available at http://systemsbiotech.co.kr.
The co-first authors, Dr. Woo Dae Jang and Ph.D. student Gi Bae Kim, said, “We conducted this study to address the demand for updating the previously distributed chemicals map and enhancing its versatility.” “The map is expected to be utilized in a variety of research and in efforts to set strategies and prospects for chemical production incorporating bio and chemical methods that are detailed in the map.”
Distinguished Professor Sang Yup Lee said, “The interactive bio-based chemicals map is expected to help design and optimization of the metabolic pathways for the biosynthesis of target chemicals together with the strategies of chemical conversions, serving as a blueprint for developing further ideas on the production of desired chemicals through biological and/or chemical reactions.”
The interactive metabolic map of bio-based chemicals.
2022.08.11 View 16104
Interactive Map of Metabolical Synthesis of Chemicals
An interactive map that compiled the chemicals produced by biological, chemical and combined reactions has been distributed on the web
- A team led by Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering, organized and distributed an all-inclusive listing of chemical substances that can be synthesized using microorganisms
- It is expected to be used by researchers around the world as it enables easy assessment of the synthetic pathway through the web.
A research team comprised of Woo Dae Jang, Gi Bae Kim, and Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering at KAIST reported an interactive metabolic map of bio-based chemicals. Their research paper “An interactive metabolic map of bio-based chemicals” was published online in Trends in Biotechnology on August 10, 2022.
As a response to rapid climate change and environmental pollution, research on the production of petrochemical products using microorganisms is receiving attention as a sustainable alternative to existing methods of productions. In order to synthesize various chemical substances, materials, and fuel using microorganisms, it is necessary to first construct the biosynthetic pathway toward desired product by exploration and discovery and introduce them into microorganisms. In addition, in order to efficiently synthesize various chemical substances, it is sometimes necessary to employ chemical methods along with bioengineering methods using microorganisms at the same time. For the production of non-native chemicals, novel pathways are designed by recruiting enzymes from heterologous sources or employing enzymes designed though rational engineering, directed evolution, or ab initio design.
The research team had completed a map of chemicals which compiled all available pathways of biological and/or chemical reactions that lead to the production of various bio-based chemicals back in 2019 and published the map in Nature Catalysis. The map was distributed in the form of a poster to industries and academia so that the synthesis paths of bio-based chemicals could be checked at a glance.
The research team has expanded the bio-based chemicals map this time in the form of an interactive map on the web so that anyone with internet access can quickly explore efficient paths to synthesize desired products. The web-based map provides interactive visual tools to allow interactive visualization, exploration, and analysis of complex networks of biological and/or chemical reactions toward the desired products. In addition, the reported paper also discusses the production of natural compounds that are used for diverse purposes such as food and medicine, which will help designing novel pathways through similar approaches or by exploiting the promiscuity of enzymes described in the map. The published bio-based chemicals map is also available at http://systemsbiotech.co.kr.
The co-first authors, Dr. Woo Dae Jang and Ph.D. student Gi Bae Kim, said, “We conducted this study to address the demand for updating the previously distributed chemicals map and enhancing its versatility.” “The map is expected to be utilized in a variety of research and in efforts to set strategies and prospects for chemical production incorporating bio and chemical methods that are detailed in the map.”
Distinguished Professor Sang Yup Lee said, “The interactive bio-based chemicals map is expected to help design and optimization of the metabolic pathways for the biosynthesis of target chemicals together with the strategies of chemical conversions, serving as a blueprint for developing further ideas on the production of desired chemicals through biological and/or chemical reactions.”
The interactive metabolic map of bio-based chemicals.
2022.08.11 View 16104 -
 KAIST Honors BMW and Hyundai with the 2022 Future Mobility of the Year Award
BMW ‘iVision Circular’, Commercial Vehicle-Hyundai Motors ‘Trailer Drone’ selected as winners of the international awards for concept cars established by KAIST Cho Chun Shik Graduate School of Mobility to honor car makers that strive to present new visions in the field of eco-friendly design of automobiles and unmanned logistics.
KAIST (President Kwang Hyung Lee) hosted the “2022 Future Mobility of the Year (FMOTY) Awards” at the Convention Hall of the BEXCO International Motor Show at Busan in the afternoon of the 14th.
The Future Mobility of the Year Awards is an award ceremony that selects a model that showcases useful transportation technology and innovative service concepts for the future society among the set of concept cars exhibited at the motor show.
As a one-of-a-kind international concept car awards established by KAIST's Cho Chun Shik Graduate School of Mobility (Headed by Professor Jang In-Gwon), the auto journalists from 11 countries were invited to be the jurors to select the winner. With the inaugural awards ceremony held in 2019, over the past three years, automakers from around the globe, including internationally renowned automakers, such as, Volvo/Toyota (2019), Honda/Hyundai (2020), and Renault (2021), even a new start-up car manufacturer like Canoo, the winner of last year’s award for commercial vehicles, were honored for their award-winning works.
At this year’s awards ceremony, the 4th of its kind, BMW's “iVision Circular” and Hyundai's “'Trailer Drone” were selected as the best concept cars of the year, the former from the Private Mobility category and the latter from the Public & Commercial Vehicles category.
The jury consisting of 16 domestic and foreign auto journalists, including BBC Top Gear's Paul Horrell and Car Magazine’s Georg Kacher, evaluated 53 concept car contestants that made their entry last year. The jurors’ general comment was that while the trend of the global automobile market flowing fast towards electric vehicles, this year's award-winning works presented a new vision in the field of eco-friendly design and unmanned logistics.
Private Mobility Categry Winner: BMW iVision Circular
BMW's 'iVision Circular', the winner of the Private Mobility category, is an eco-friendly compact car in which all parts of the vehicle are designed with recycled and/or natural materials. It has received favorable reviews for its in-depth implementation of the concept of a futuristic eco-friendly car by manufacturing the tires from natural rubber and adopting a design that made recycling of its parts very easily when the car is to be disposed of.
Public & Commercial Vehicles Categry Winner: Hyundai Trailer Drone
Hyundai Motor Company’s “Trailer Drone”, the winner of the Public & Commercial Vehicles category, is an eco-friendly autonomous driving truck that can transport large-scale logistics from a port to a destination without a human driver while two unmanned vehicles push and drag a trailer. The concept car won supports from a large number of judges for the blueprint it presented for a groundbreaking logistics service that applied both eco-friendly hydrogen fuel cell and fully autonomous driving technology.
Jurors from overseas congratulated the development team of BMW and Hyundai Motor Company via a video message for providing a new direction for the global automobile industry as it strives to transform in line with the changes in the post-pandemic era.
Professor Bo-won Kim, the Vice President for Planning and Budget of KAIST, who presented the awards, said, “It is time for the K-Mobility wave to sweep over the global mobility industry.” “KAIST will lead in the various fields of mobility technologies to support global automakers,” he added.
Splitting the center are KAIST Vice President Bo-Won Kim on the right, and Seong-Kwon Lee,
the Deputy Mayor of the City of Busan on the left. To Kim's left is the Senior VP of BMW Asia-Pacific, Eastern Europe, Middle East, Africa, Jean-Philippe Parain, and to Lee's Right is Sangyup Lee,
the Head of Hyundai Motor Design Center and the Executive VP of Hyundai Motors.
At the ceremony, along with KAIST officials, including Vice President Bo-Won Kim and Professor In-Gwon Jang, the Head of Cho Chun Shik Graduate School of Mobility, are the Deputy Mayor Seong-Kwon Lee of the City of Busan and the figures from the automobile industry, including Jean-Philippe Parain, the Senior Vice President of BMW Asia-Pacific, Eastern Europe, Middle East, Africa, who is visiting Korea to receive the '2022 Future Mobility' award, and Sangyup Lee, the Head of Hyundai Motor Design Center and the Executive Vice President of Hyundai Motor Company, were in the attendance.
More information about the awards ceremony and winning works are available at the official website of this year's Future Mobility Awards (www.fmoty.org).
Profile:In-Gwon Jang, Ph.D.Presidentthe Organizing Committeethe Future Mobility of the Year Awardshttp://www.fmoty.org/
Head ProfessorKAIST Cho Chun Shik Graduate School of Mobilityhttps://gt.kaist.ac.kr
2022.07.14 View 15860
KAIST Honors BMW and Hyundai with the 2022 Future Mobility of the Year Award
BMW ‘iVision Circular’, Commercial Vehicle-Hyundai Motors ‘Trailer Drone’ selected as winners of the international awards for concept cars established by KAIST Cho Chun Shik Graduate School of Mobility to honor car makers that strive to present new visions in the field of eco-friendly design of automobiles and unmanned logistics.
KAIST (President Kwang Hyung Lee) hosted the “2022 Future Mobility of the Year (FMOTY) Awards” at the Convention Hall of the BEXCO International Motor Show at Busan in the afternoon of the 14th.
The Future Mobility of the Year Awards is an award ceremony that selects a model that showcases useful transportation technology and innovative service concepts for the future society among the set of concept cars exhibited at the motor show.
As a one-of-a-kind international concept car awards established by KAIST's Cho Chun Shik Graduate School of Mobility (Headed by Professor Jang In-Gwon), the auto journalists from 11 countries were invited to be the jurors to select the winner. With the inaugural awards ceremony held in 2019, over the past three years, automakers from around the globe, including internationally renowned automakers, such as, Volvo/Toyota (2019), Honda/Hyundai (2020), and Renault (2021), even a new start-up car manufacturer like Canoo, the winner of last year’s award for commercial vehicles, were honored for their award-winning works.
At this year’s awards ceremony, the 4th of its kind, BMW's “iVision Circular” and Hyundai's “'Trailer Drone” were selected as the best concept cars of the year, the former from the Private Mobility category and the latter from the Public & Commercial Vehicles category.
The jury consisting of 16 domestic and foreign auto journalists, including BBC Top Gear's Paul Horrell and Car Magazine’s Georg Kacher, evaluated 53 concept car contestants that made their entry last year. The jurors’ general comment was that while the trend of the global automobile market flowing fast towards electric vehicles, this year's award-winning works presented a new vision in the field of eco-friendly design and unmanned logistics.
Private Mobility Categry Winner: BMW iVision Circular
BMW's 'iVision Circular', the winner of the Private Mobility category, is an eco-friendly compact car in which all parts of the vehicle are designed with recycled and/or natural materials. It has received favorable reviews for its in-depth implementation of the concept of a futuristic eco-friendly car by manufacturing the tires from natural rubber and adopting a design that made recycling of its parts very easily when the car is to be disposed of.
Public & Commercial Vehicles Categry Winner: Hyundai Trailer Drone
Hyundai Motor Company’s “Trailer Drone”, the winner of the Public & Commercial Vehicles category, is an eco-friendly autonomous driving truck that can transport large-scale logistics from a port to a destination without a human driver while two unmanned vehicles push and drag a trailer. The concept car won supports from a large number of judges for the blueprint it presented for a groundbreaking logistics service that applied both eco-friendly hydrogen fuel cell and fully autonomous driving technology.
Jurors from overseas congratulated the development team of BMW and Hyundai Motor Company via a video message for providing a new direction for the global automobile industry as it strives to transform in line with the changes in the post-pandemic era.
Professor Bo-won Kim, the Vice President for Planning and Budget of KAIST, who presented the awards, said, “It is time for the K-Mobility wave to sweep over the global mobility industry.” “KAIST will lead in the various fields of mobility technologies to support global automakers,” he added.
Splitting the center are KAIST Vice President Bo-Won Kim on the right, and Seong-Kwon Lee,
the Deputy Mayor of the City of Busan on the left. To Kim's left is the Senior VP of BMW Asia-Pacific, Eastern Europe, Middle East, Africa, Jean-Philippe Parain, and to Lee's Right is Sangyup Lee,
the Head of Hyundai Motor Design Center and the Executive VP of Hyundai Motors.
At the ceremony, along with KAIST officials, including Vice President Bo-Won Kim and Professor In-Gwon Jang, the Head of Cho Chun Shik Graduate School of Mobility, are the Deputy Mayor Seong-Kwon Lee of the City of Busan and the figures from the automobile industry, including Jean-Philippe Parain, the Senior Vice President of BMW Asia-Pacific, Eastern Europe, Middle East, Africa, who is visiting Korea to receive the '2022 Future Mobility' award, and Sangyup Lee, the Head of Hyundai Motor Design Center and the Executive Vice President of Hyundai Motor Company, were in the attendance.
More information about the awards ceremony and winning works are available at the official website of this year's Future Mobility Awards (www.fmoty.org).
Profile:In-Gwon Jang, Ph.D.Presidentthe Organizing Committeethe Future Mobility of the Year Awardshttp://www.fmoty.org/
Head ProfessorKAIST Cho Chun Shik Graduate School of Mobilityhttps://gt.kaist.ac.kr
2022.07.14 View 15860 -
 Game Design Guide Book for Middle-Aged and Older Adult Players Helps Rewrite Gaming Culture
The online book ‘Game Design Guide for Adults in Their 50s and Older’ helps to increase accessibility for adult gamers
A KAIST multi-disciplinary research team published a game guide to respond to the new demands of senior gamers and expand the gaming market. The guide will be helpful for designing interfaces fit for senior groups as a way to minimize the cognitive burdens related to aging. It also helps readers understand older users’ cognitive abilities and socioemotional characteristics.
“This guide analyzed the game experience of players in their 50s and older and converted it into a game design element that can be easily referred to by game developers and designers,” explained Professor Young Im Do from the Graduate School of Culture Technology who led the research.
The gaming industry is paying attention to the emerging trend of ‘active aging’ and senior gamers. According to the National Purchase Diary Panel Inc., game play time increased significantly in the 45-64 age group compared to other age groups during the pandemic. Despite the growing number of senior gamers, it is still difficult for older novice players to start video games because most commercial games focus on younger players. For example, older players can feel frustrated if the game requires fast reflexes and accurate timing. Font sizes and objects that are too small as well as interfaces that are too complicated can be challenging for senior gamers.
The research team presents how to handle these difficulties in game design considering the visual-motor coordination of people in age groups ranging from their 20s to 80s. It also proposes various game elements such as audio-visual elements, cognitive and motor elements, game rules, stories and characters, social aspects, in-app purchases, and advertisements for senior groups. The guide also proposes a game service model and introduces examples of game prototypes that apply supportive technology.
For this guide, the researchers operated the “International Game Living Lab”, which is an open space for creating novel and innovative solutions by converging IT technology into daily life. In the lab, ordinary citizens, research institutes, companies, and local communities formed a cooperative network and actively participated in experiments, education, and discussions for finding solutions over three years.
Researchers in multi-disciplinary fields, including computer science, psychology, game design, and gerontechnology, covered various methodologies to understand the game experience of adults in their 50s and older. In order to profile players of this age group, three different approaches were performed: visual-motor coordination experiments, an EEG (Electroencephalogram) test, and a gameplay workshop. Then, they converted the results into practical knowledge that can be used in the gaming industry.
Professor Kyung Myun Lee from the School of Digital Humanities and Computational Social Sciences at KAIST, Professor Byungjoo Shin from Yonsei University, CEO Junyoung Shin of CareU, and CEO Minseok Doh of Heartverse participated in this online book which is available to the public at https://wikidocs.net/book/7356.
2022.06.10 View 6899
Game Design Guide Book for Middle-Aged and Older Adult Players Helps Rewrite Gaming Culture
The online book ‘Game Design Guide for Adults in Their 50s and Older’ helps to increase accessibility for adult gamers
A KAIST multi-disciplinary research team published a game guide to respond to the new demands of senior gamers and expand the gaming market. The guide will be helpful for designing interfaces fit for senior groups as a way to minimize the cognitive burdens related to aging. It also helps readers understand older users’ cognitive abilities and socioemotional characteristics.
“This guide analyzed the game experience of players in their 50s and older and converted it into a game design element that can be easily referred to by game developers and designers,” explained Professor Young Im Do from the Graduate School of Culture Technology who led the research.
The gaming industry is paying attention to the emerging trend of ‘active aging’ and senior gamers. According to the National Purchase Diary Panel Inc., game play time increased significantly in the 45-64 age group compared to other age groups during the pandemic. Despite the growing number of senior gamers, it is still difficult for older novice players to start video games because most commercial games focus on younger players. For example, older players can feel frustrated if the game requires fast reflexes and accurate timing. Font sizes and objects that are too small as well as interfaces that are too complicated can be challenging for senior gamers.
The research team presents how to handle these difficulties in game design considering the visual-motor coordination of people in age groups ranging from their 20s to 80s. It also proposes various game elements such as audio-visual elements, cognitive and motor elements, game rules, stories and characters, social aspects, in-app purchases, and advertisements for senior groups. The guide also proposes a game service model and introduces examples of game prototypes that apply supportive technology.
For this guide, the researchers operated the “International Game Living Lab”, which is an open space for creating novel and innovative solutions by converging IT technology into daily life. In the lab, ordinary citizens, research institutes, companies, and local communities formed a cooperative network and actively participated in experiments, education, and discussions for finding solutions over three years.
Researchers in multi-disciplinary fields, including computer science, psychology, game design, and gerontechnology, covered various methodologies to understand the game experience of adults in their 50s and older. In order to profile players of this age group, three different approaches were performed: visual-motor coordination experiments, an EEG (Electroencephalogram) test, and a gameplay workshop. Then, they converted the results into practical knowledge that can be used in the gaming industry.
Professor Kyung Myun Lee from the School of Digital Humanities and Computational Social Sciences at KAIST, Professor Byungjoo Shin from Yonsei University, CEO Junyoung Shin of CareU, and CEO Minseok Doh of Heartverse participated in this online book which is available to the public at https://wikidocs.net/book/7356.
2022.06.10 View 6899 -
 Professor Sang Su Lee’s Team Wins Seven iF Design Awards 2022
Professor Sang Su Lee from the Department of Industrial Design and his team’s five apps made in collaboration with NH Investment and Securities won iF Design Awards in the fields of UI, UX, service design, product design, and communication. These apps are now offered as NH Investment and Securities mobile applications.
The iF Design Awards recognize top quality creativity in product design, communication, packaging, service design and concepts, and architecture and interior design, as well as user experience (UX) and interface for digital media (UI).
In the field of UI, ‘Gretell’ is a mobile stock investment app service designed by Lee and his team to support investors struggling to learn about investing by archiving personalized information. Gretell provides investment information including news and reports. Users learn, evaluate, and leave comments. This shows both quantitative and qualitative indications, leading to rational decision-making. Other user’s comments are shared to reduce confirmation bias. Through this process, Gretell helps users who are impulsive or easily swayed by others’ opinions to grow as independent investors.
‘Bright’ is another app created by Lee’s team. It helps people exercise their rights as shareholders. As the need to exercise shareholders’ rights increases, many people are frustrated that investors with a small number of shares don’t have a lot of power. Bright provides a space for shareholders to share their opinions and brings people together so that individuals can be more proactive as shareholders. The Integrated Power of Attorney System (IPAS) expands the chances for shareholders to exercise their rights and allows users to submit proposals that can be communicated during the general meeting. Bright fosters influential shareholders, responsible companies, and a healthy society.
For communications, ‘Rewind’ is a stock information services app that visualizes past stock charts through sentiment analysis. Existing services focus on numbers, while Rewind takes a qualitative approach. Rewind analyzes public sentiment toward each event by collecting opinions on social media and then visualizes them chronologically along with the stock chart. Rewind allows users to review stock market movements and record their thoughts. Users can gain their own insights into current events in the stock market and make wiser investment decisions. The intuitive color gradient design provides a pleasant and simplified information experience.
In the area of interfaces for digital media and service design, ‘Groo’ is a green bond investing service app that helps users participate in green investment though investing in green bonds that support green projects for environmental improvement. Not restricted to trading bonds, Groo joins users in the holistic experience of green investing, from taking an interest in environmental issues to confirming the impact of the investment.
Next, ‘Modu’ is a story-based empathy expression training game for children with intellectual disabilities. Modu was developed to support emotion recognition and empathy behavior training in children with mild intellectual disabilities (MID) and borderline intellectual functioning (BIF).
Finally, the diving VR device for neutral buoyancy training, ‘Blow-yancy’, also made winner’s list. The device mimics scuba diving training without having to go into the water, therefore beginner divers are able getting feeling of diving while remaining perfectly safe and not harming any corals. It is expected that the device will be able to help protect at-risk underwater ecosystems.
2022.05.10 View 9540
Professor Sang Su Lee’s Team Wins Seven iF Design Awards 2022
Professor Sang Su Lee from the Department of Industrial Design and his team’s five apps made in collaboration with NH Investment and Securities won iF Design Awards in the fields of UI, UX, service design, product design, and communication. These apps are now offered as NH Investment and Securities mobile applications.
The iF Design Awards recognize top quality creativity in product design, communication, packaging, service design and concepts, and architecture and interior design, as well as user experience (UX) and interface for digital media (UI).
In the field of UI, ‘Gretell’ is a mobile stock investment app service designed by Lee and his team to support investors struggling to learn about investing by archiving personalized information. Gretell provides investment information including news and reports. Users learn, evaluate, and leave comments. This shows both quantitative and qualitative indications, leading to rational decision-making. Other user’s comments are shared to reduce confirmation bias. Through this process, Gretell helps users who are impulsive or easily swayed by others’ opinions to grow as independent investors.
‘Bright’ is another app created by Lee’s team. It helps people exercise their rights as shareholders. As the need to exercise shareholders’ rights increases, many people are frustrated that investors with a small number of shares don’t have a lot of power. Bright provides a space for shareholders to share their opinions and brings people together so that individuals can be more proactive as shareholders. The Integrated Power of Attorney System (IPAS) expands the chances for shareholders to exercise their rights and allows users to submit proposals that can be communicated during the general meeting. Bright fosters influential shareholders, responsible companies, and a healthy society.
For communications, ‘Rewind’ is a stock information services app that visualizes past stock charts through sentiment analysis. Existing services focus on numbers, while Rewind takes a qualitative approach. Rewind analyzes public sentiment toward each event by collecting opinions on social media and then visualizes them chronologically along with the stock chart. Rewind allows users to review stock market movements and record their thoughts. Users can gain their own insights into current events in the stock market and make wiser investment decisions. The intuitive color gradient design provides a pleasant and simplified information experience.
In the area of interfaces for digital media and service design, ‘Groo’ is a green bond investing service app that helps users participate in green investment though investing in green bonds that support green projects for environmental improvement. Not restricted to trading bonds, Groo joins users in the holistic experience of green investing, from taking an interest in environmental issues to confirming the impact of the investment.
Next, ‘Modu’ is a story-based empathy expression training game for children with intellectual disabilities. Modu was developed to support emotion recognition and empathy behavior training in children with mild intellectual disabilities (MID) and borderline intellectual functioning (BIF).
Finally, the diving VR device for neutral buoyancy training, ‘Blow-yancy’, also made winner’s list. The device mimics scuba diving training without having to go into the water, therefore beginner divers are able getting feeling of diving while remaining perfectly safe and not harming any corals. It is expected that the device will be able to help protect at-risk underwater ecosystems.
2022.05.10 View 9540 -
 Deep Learning Framework to Enable Material Design in Unseen Domain
Researchers propose a deep neural network-based forward design space exploration using active transfer learning and data augmentation
A new study proposed a deep neural network-based forward design approach that enables an efficient search for superior materials far beyond the domain of the initial training set. This approach compensates for the weak predictive power of neural networks on an unseen domain through gradual updates of the neural network with active transfer learning and data augmentation methods.
Professor Seungwha Ryu believes that this study will help address a variety of optimization problems that have an astronomical number of possible design configurations. For the grid composite optimization problem, the proposed framework was able to provide excellent designs close to the global optima, even with the addition of a very small dataset corresponding to less than 0.5% of the initial training data-set size. This study was reported in npj Computational Materials last month.
“We wanted to mitigate the limitation of the neural network, weak predictive power beyond the training set domain for the material or structure design,” said Professor Ryu from the Department of Mechanical Engineering.
Neural network-based generative models have been actively investigated as an inverse design method for finding novel materials in a vast design space. However, the applicability of conventional generative models is limited because they cannot access data outside the range of training sets. Advanced generative models that were devised to overcome this limitation also suffer from weak predictive power for the unseen domain.
Professor Ryu’s team, in collaboration with researchers from Professor Grace Gu’s group at UC Berkeley, devised a design method that simultaneously expands the domain using the strong predictive power of a deep neural network and searches for the optimal design by repetitively performing three key steps.
First, it searches for few candidates with improved properties located close to the training set via genetic algorithms, by mixing superior designs within the training set. Then, it checks to see if the candidates really have improved properties, and expands the training set by duplicating the validated designs via a data augmentation method. Finally, they can expand the reliable prediction domain by updating the neural network with the new superior designs via transfer learning. Because the expansion proceeds along relatively narrow but correct routes toward the optimal design (depicted in the schematic of Fig. 1), the framework enables an efficient search.
As a data-hungry method, a deep neural network model tends to have reliable predictive power only within and near the domain of the training set. When the optimal configuration of materials and structures lies far beyond the initial training set, which frequently is the case, neural network-based design methods suffer from weak predictive power and become inefficient.
Researchers expect that the framework will be applicable for a wide range of optimization problems in other science and engineering disciplines with astronomically large design space, because it provides an efficient way of gradually expanding the reliable prediction domain toward the target design while avoiding the risk of being stuck in local minima. Especially, being a less-data-hungry method, design problems in which data generation is time-consuming and expensive will benefit most from this new framework.
The research team is currently applying the optimization framework for the design task of metamaterial structures, segmented thermoelectric generators, and optimal sensor distributions. “From these sets of on-going studies, we expect to better recognize the pros and cons, and the potential of the suggested algorithm. Ultimately, we want to devise more efficient machine learning-based design approaches,” explained Professor Ryu.This study was funded by the National Research Foundation of Korea and the KAIST Global Singularity Research Project.
-Publication
Yongtae Kim, Youngsoo, Charles Yang, Kundo Park, Grace X. Gu, and Seunghwa Ryu, “Deep learning framework for material design space exploration using active transfer learning and data augmentation,” npj Computational Materials (https://doi.org/10.1038/s41524-021-00609-2)
-Profile
Professor Seunghwa Ryu
Mechanics & Materials Modeling Lab
Department of Mechanical Engineering
KAIST
2021.09.29 View 13211
Deep Learning Framework to Enable Material Design in Unseen Domain
Researchers propose a deep neural network-based forward design space exploration using active transfer learning and data augmentation
A new study proposed a deep neural network-based forward design approach that enables an efficient search for superior materials far beyond the domain of the initial training set. This approach compensates for the weak predictive power of neural networks on an unseen domain through gradual updates of the neural network with active transfer learning and data augmentation methods.
Professor Seungwha Ryu believes that this study will help address a variety of optimization problems that have an astronomical number of possible design configurations. For the grid composite optimization problem, the proposed framework was able to provide excellent designs close to the global optima, even with the addition of a very small dataset corresponding to less than 0.5% of the initial training data-set size. This study was reported in npj Computational Materials last month.
“We wanted to mitigate the limitation of the neural network, weak predictive power beyond the training set domain for the material or structure design,” said Professor Ryu from the Department of Mechanical Engineering.
Neural network-based generative models have been actively investigated as an inverse design method for finding novel materials in a vast design space. However, the applicability of conventional generative models is limited because they cannot access data outside the range of training sets. Advanced generative models that were devised to overcome this limitation also suffer from weak predictive power for the unseen domain.
Professor Ryu’s team, in collaboration with researchers from Professor Grace Gu’s group at UC Berkeley, devised a design method that simultaneously expands the domain using the strong predictive power of a deep neural network and searches for the optimal design by repetitively performing three key steps.
First, it searches for few candidates with improved properties located close to the training set via genetic algorithms, by mixing superior designs within the training set. Then, it checks to see if the candidates really have improved properties, and expands the training set by duplicating the validated designs via a data augmentation method. Finally, they can expand the reliable prediction domain by updating the neural network with the new superior designs via transfer learning. Because the expansion proceeds along relatively narrow but correct routes toward the optimal design (depicted in the schematic of Fig. 1), the framework enables an efficient search.
As a data-hungry method, a deep neural network model tends to have reliable predictive power only within and near the domain of the training set. When the optimal configuration of materials and structures lies far beyond the initial training set, which frequently is the case, neural network-based design methods suffer from weak predictive power and become inefficient.
Researchers expect that the framework will be applicable for a wide range of optimization problems in other science and engineering disciplines with astronomically large design space, because it provides an efficient way of gradually expanding the reliable prediction domain toward the target design while avoiding the risk of being stuck in local minima. Especially, being a less-data-hungry method, design problems in which data generation is time-consuming and expensive will benefit most from this new framework.
The research team is currently applying the optimization framework for the design task of metamaterial structures, segmented thermoelectric generators, and optimal sensor distributions. “From these sets of on-going studies, we expect to better recognize the pros and cons, and the potential of the suggested algorithm. Ultimately, we want to devise more efficient machine learning-based design approaches,” explained Professor Ryu.This study was funded by the National Research Foundation of Korea and the KAIST Global Singularity Research Project.
-Publication
Yongtae Kim, Youngsoo, Charles Yang, Kundo Park, Grace X. Gu, and Seunghwa Ryu, “Deep learning framework for material design space exploration using active transfer learning and data augmentation,” npj Computational Materials (https://doi.org/10.1038/s41524-021-00609-2)
-Profile
Professor Seunghwa Ryu
Mechanics & Materials Modeling Lab
Department of Mechanical Engineering
KAIST
2021.09.29 View 13211